BUCK变换器设计.docx
《BUCK变换器设计.docx》由会员分享,可在线阅读,更多相关《BUCK变换器设计.docx(15页珍藏版)》请在冰豆网上搜索。
BUCK变换器设计报告
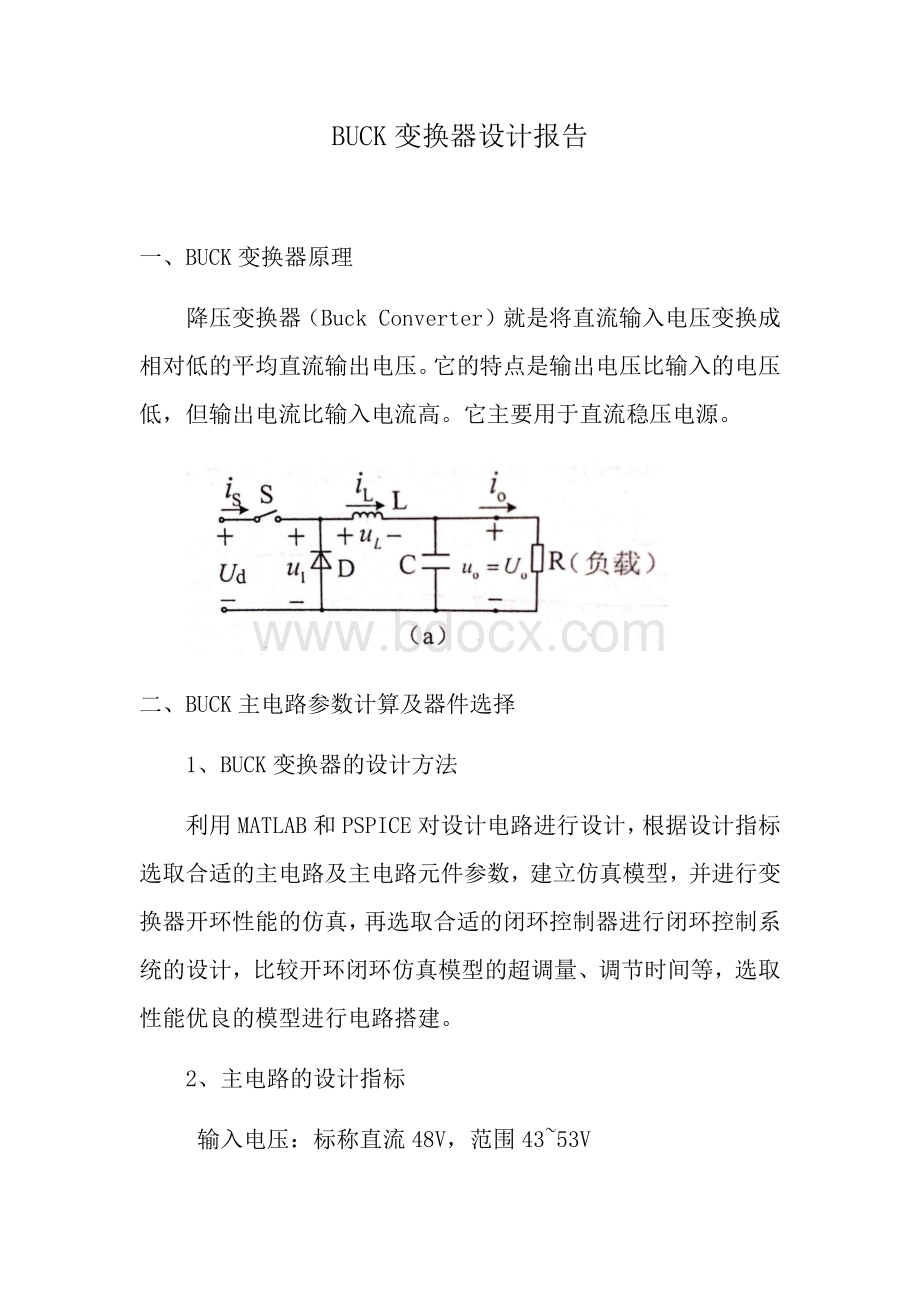
一、BUCK变换器原理
降压变换器(BuckConverter)就是将直流输入电压变换成相对低的平均直流输出电压。
它的特点是输出电压比输入的电压低,但输出电流比输入电流高。
它主要用于直流稳压电源。
二、BUCK主电路参数计算及器件选择
1、BUCK变换器的设计方法
利用MATLAB和PSPICE对设计电路进行设计,根据设计指标选取合适的主电路及主电路元件参数,建立仿真模型,并进行变换器开环性能的仿真,再选取合适的闭环控制器进行闭环控制系统的设计,比较开环闭环仿真模型的超调量、调节时间等,选取性能优良的模型进行电路搭建。
2、主电路的设计指标
输入电压:
标称直流48V,范围43~53V
输出电压:
直流24V,5A
输出电压纹波:
100mV
电流纹波:
0.25A
开关频率:
250kHz
相位裕量:
60°
幅值裕量:
10dB
3、BUCK主电路
主电路的相关参数:
开关周期:
TS==4×10-6s
占空比:
当输入电压为43V时,Dmax=0.55814
当输入电压为53V时,Dmin=0.45283
输出电压:
VO=24V输出电流IO=5A
纹波电流:
ΔiL=0.25A
纹波电压:
ΔVL=100mV
电感量计算:
由ΔiL=DTS得:
L=DminTS=×0.4528×4×10-6=1.05×10-4H
电容量计算:
由ΔVL=TS得:
C=TS=×4×10-6=1.25×10-6F
而实际中,考虑到能量存储以及输入和负载变化的影响,C的取值一般要大于该计算值,故取值为120μF。
实际中,电解电容一般都具有等效串联电阻,因此在选择的过程中要注意此电阻的大小对系统性能的影响。
通常钽电容的ESR在100毫欧姆以下,而铝电解电容则高于这个数值,有些种类电容的ESR甚至高达数欧。
ESR的高低与电容的容量、电压、频率和温度等多因素有关,一般对于等效串联电阻过大的电容,我们可以采用电容并联的方法减小此串联电阻。
此处取RESR=50mΩ。
4、主电路的开环传递函数
取RESR=50mΩ,R=4.8Ω,C=120μF,L=105μH,Vin=48V,
可得传递函数为:
在MATLAB中根据开环传递函数画出Bode图:
>>clear
>>num0=[2.88e-4,48];
>>den1=[1.27313e-8,2.7875e-5,1];
>>bode(num0,den1)
>>[kg,gm,wkg,wgm]=margin(num0,den1)
>>grid
相角裕量23.0483,显然不符合设计要求,考虑对其增添闭环控制回路进行校正。
5、主电路的PSIM仿真
电路如下:
电流I1波形如下:
电压V1波形如下:
三、BUCK变换器控制框图
BUCK变换器的控制器主要有电压型控制和电流型控制,其各自电路图如下所示
①电压型:
②电流型:
电压型控制原理是将开环电路的输出电压进行采样,采样信号H(s)与基准电压VREF输送到误差放大器,G(s)设计的有源串联校正PID环节。
其输出经过补偿在经过PWM,调制后的信号控制开关Q的通断,以此来控制输出电压的稳定,达到闭环控制的目的;电流型控制用通过功率开关的电流波形替代普通PWM的载波信号,每个开关周期之初,由时钟脉冲置位RS触发器,于是Q1导通,之后iL逐渐增加,当iL大于调制信号时,比较器翻转并复位RS触发器,Q1关断。
综合考虑难易程度和功能特性,本设计采用电压型控制电路。
采用电压型控制电路的BUCK转换器原理框图如下所示:
Gvd(s)为开环增益,Gc(s)×GPWM为调节器,H为反馈因子。
则该框图的闭环增益为:
三、K--因子法设计控制器
调节器类型有三种:
PID调节器性能最佳。
搭建好闭环电路,确定串联PID校正环节,确定新的开环剪切频率和相位裕量,确定控制回路中各个电阻电容的取值,这一工作可采用K--因子法完成,K--因子法设计步骤是:
①确定新的剪切频率;
②确定校正前处的相角和校正后的相位裕量,计算需要的相位超前量。
计算公式为
③基于确定K值,PID调节器公式为:
④基于K--因子确定补偿器的零点、极点位置,并计算调节器参数。
公式为:
⑤校正环节传递函数如下为:
取
计算得
校正环节传递函数为
四、MATLABSISOTOOL
利用以上求得的数据,用MATLAB的SISOTOOL工具箱可以画出加入补偿器后的传递函数BODE图如下
幅值裕量、相角裕量均满足设计要求
五、PSIM仿真结果
1、带有PID调节器的PSIM电路如下所示:
2、将R1、R2、R3、C1、C2、C3参数输入以上电路,仿真结果如下:
VO波形如下
将X坐标轴改为0.004到0.0045范围
IO波形如下
将X坐标轴改为0.004到0.0045范围
电流电压纹波均满足设计要求。
 升级会员
升级会员 