西北工业大学研究生入学考试机械原理题库2Word文档格式.doc
《西北工业大学研究生入学考试机械原理题库2Word文档格式.doc》由会员分享,可在线阅读,更多相关《西北工业大学研究生入学考试机械原理题库2Word文档格式.doc(4页珍藏版)》请在冰豆网上搜索。
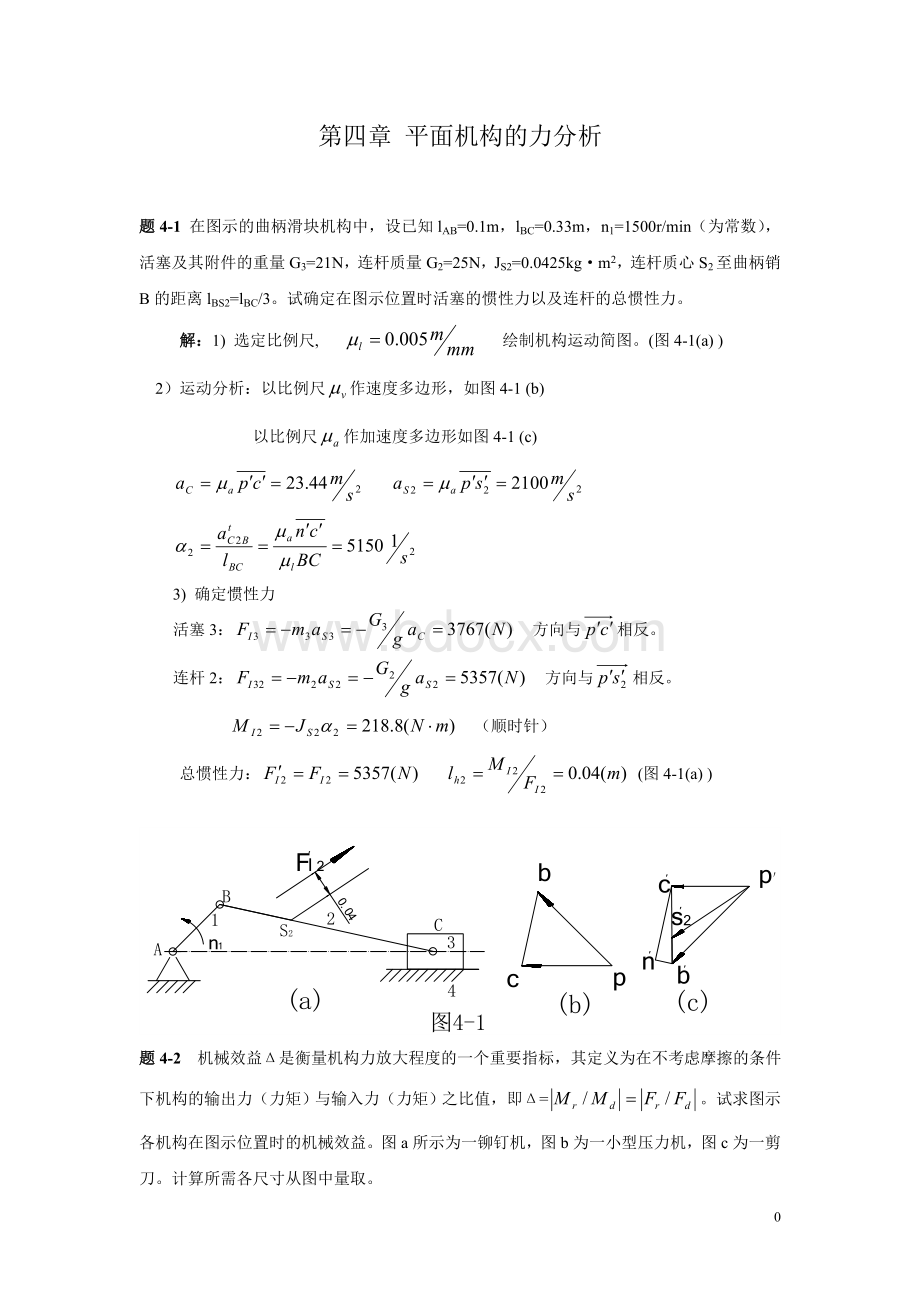
1)选定比例尺,绘制机构运动简图。
(图4-1(a))
2)运动分析:
以比例尺作速度多边形,如图4-1(b)
以比例尺作加速度多边形如图4-1(c)
3)确定惯性力
活塞3:
方向与相反。
连杆2:
(顺时针)
总惯性力:
(图4-1(a))
题4-2机械效益Δ是衡量机构力放大程度的一个重要指标,其定义为在不考虑摩擦的条件下机构的输出力(力矩)与输入力(力矩)之比值,即Δ=。
试求图示各机构在图示位置时的机械效益。
图a所示为一铆钉机,图b为一小型压力机,图c为一剪刀。
计算所需各尺寸从图中量取。
(a)(b)(c)
(a)作铆钉机的机构运动简图及受力图见4-2(a)
由构件3的力平衡条件有:
由构件1的力平衡条件有:
按上面两式作力的多边形见图4-2(b)得
(b)作压力机的机构运动简图及受力图见4-2(c)
由滑块5的力平衡条件有:
由构件2的力平衡条件有:
其中
按上面两式作力的多边形见图4-2(d)得
(c)对A点取矩时有
其中a、b为Fr、Fd两力距离A点的力臂。
题4-3图a所示导轨副为由拖板1与导轨2组成的复合移动副,拖板的运动方向垂直于纸面;
图b所示为由转动轴1与轴承2组成的复合转动副,轴1绕其轴线转动。
现已知各运动副的尺寸如图所示,并设G为外加总载荷,各接触面间的摩擦系数均为f。
试分别求导轨副的当量摩擦系数fv和转动副的摩擦圆半径ρ。
1)求图a所示导轨副的当量摩擦系数,把重量G分解为G左,G右
,,
2)求图b所示转动副的摩擦圆半径
支反力,
假设支撑的左右两端均只在下半周上近似均匀接触。
对于左端其当量摩擦系数,摩擦力
摩擦力矩
对于右端其当量摩擦系数,摩擦力
摩擦圆半径
题4-4图示为一锥面径向推力轴承。
已知其几何尺寸如图所示,设轴1上受铅直总载荷G,轴承中的滑动摩擦系数为f。
试求轴1上所受的摩擦力矩Mf(分别一新轴端和跑合轴端来加以分析)。
此处为槽面接触,槽面半角为。
当量摩擦系数代入平轴端轴承的摩擦力矩公式得
若为新轴端轴承,则
若为跑合轴端轴承,则
题4-5图示为一曲柄滑块机构的三个位置,F为作用在活塞上的力,转动副A及B上所画的虚线小圆为摩擦圆,试决定在三个位置时,作用在连杆AB上的作用力的真实方向(各构件的重量及惯性力略去不计)
解:
图a和图b连杆为受压,图c连杆为受拉.,各相对角速度和运动副总反力方向如下图
3
 升级会员
升级会员 