机械动力学大作业Word文件下载.docx
《机械动力学大作业Word文件下载.docx》由会员分享,可在线阅读,更多相关《机械动力学大作业Word文件下载.docx(11页珍藏版)》请在冰豆网上搜索。
采用ADAMS软件或Matlab/Simulink环境,建立简单机械系统的动力学模型,借助软件进行求解计算和结果分析。
建立单自由度杆机构(有无滑块均可)动力学模型,由静止启动,选择一固定驱动力矩,绘制原动件在一周内的运动关系线图,具体机构及参数自拟。
二、所选题目
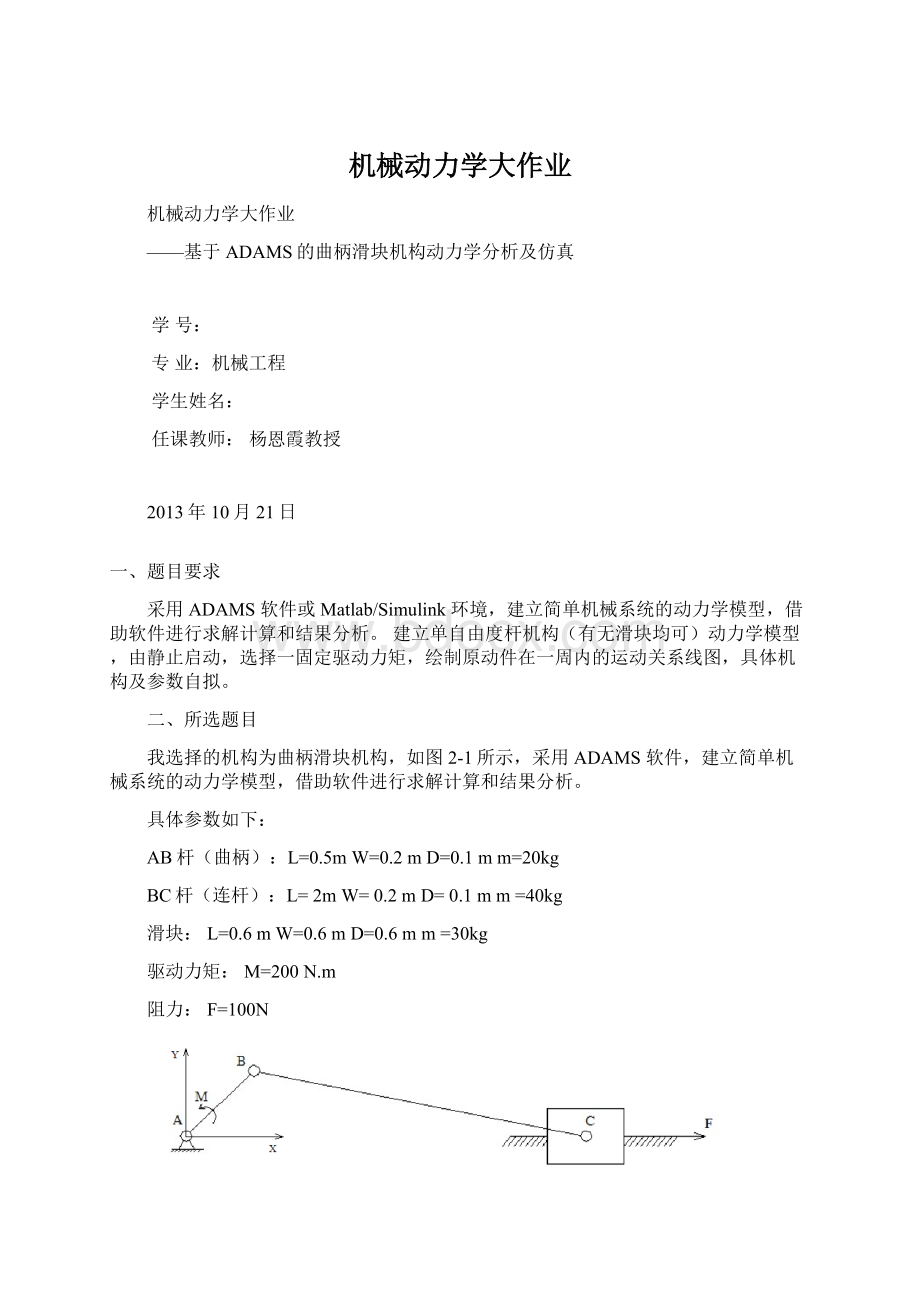
我选择的机构为曲柄滑块机构,如图2-1所示,采用ADAMS软件,建立简单机械系统的动力学模型,借助软件进行求解计算和结果分析。
具体参数如下:
AB杆(曲柄):
L=0.5mW=0.2mD=0.1mm=20kg
BC杆(连杆):
L=2mW=0.2mD=0.1mm=40kg
滑块:
L=0.6mW=0.6mD=0.6mm=30kg
驱动力矩:
M=200N.m
阻力:
F=100N
图2-1
三、建立模型
1.启动ADAMS
在欢迎对话框,选择NewModel项;
在模型名称栏输入qubing;
重力设置选择EarthNormal参数;
单位设置选择MKS系统(m,kg,N,s,deg,)如图3-1
图3-1
2检查和设置建模基本环境
1)检查默认单位系统在Settings菜单中选择Units命令,显示单位设置对话框,当前的设置应该为MKS系统。
2)设置工作栅格
①在Settings菜单,选择WorkingGrid命令,显示设置工作栅格对话框;
②设置SizeX=5.0,SizeY=5.0,SpacingX=0.1,SpacingY=0.1
③选择OK按钮。
如图:
3几何建模
1)运用rigidbody:
link功能按照已知的长宽高建立AB杆(曲柄)L=0.5mW=0.2mD=0.1mm=20kg;
如图3-3,在ADAMS/View工作窗口中先用
鼠标左键选择点(0,0,0)m,然后按照和题目中差不多的倾斜角,点击鼠标左键(本题选择点(0.5,0,0)m),创建出杆AB(PART2)。
如图3-4所表示。
图3-3图3-4
2)运用rigidbody:
link功能按照已知的长宽高建立BC杆(连杆)L=2mW=0.2mD=0.1mm=40kg;
如图3-5,在ADAMS/View工作窗口中先用
鼠标左键选择点(0.5,0,0)m,然后按照和题目中差不多的倾斜角,点击鼠标左键(本题选择点(2.5,0,0)m),创建出杆BC(PART3)。
如图3-6所表示。
图3-5图3-6
3)运用rigidbody:
box功能,按照已知的长宽高建立滑块。
L=0.6mW=0.6mD=0.6mm=30kg图3-7在ADAMS/View工作窗口中,用鼠标左键在连杆上的区域任意选择一点(本题中选择点(1.9,-0.3,0)m),并点击鼠标左键确认。
滑块C(PART4)建立如下图曲柄滑块机构模型图3-8
图3-7
图3-8
4)修改构件的质量,在各个构件位置点击右键,选择modify修改。
AB杆(曲柄)m=20kg;
BC杆(连杆)m=40kg;
滑块m=30kg如图3-9
图3-9
5)运用joint:
revolute功能,建立曲柄与地面、曲柄与连杆、连杆与滑块之间的转动副。
(1)参数选择2Bod-1Loc和NormalToGrid。
在ADAMS/View工作窗口中先用鼠标左键选择主曲柄(PART_2),然后选择机架(ground),接着选择主曲柄上的PART_2.MARKER_1,如图3-10所示。
图中显亮的部分就是所创建的旋转副(JOINT_1)
图3-10
(2)参数选择2Bod-21Loc和NormalToGrid。
在ADAMS/View工作窗口中先用鼠标左键选择连杆(PART3),然后选择曲柄(PART2),接着先后选择主曲柄上的PART_2.MARKER_2如图3-11所示。
图中显亮的部分就是所创建的旋转副(JOINT2)
图3-11
(3)参数选择2Bod-21Loc和NormalToGrid。
在ADAMS/View工作窗口中先用鼠标左键选择连杆(PART4),然后选择曲柄(PART3),接着先后选择主曲柄上的PART_3.MARKER_4如图3-12所示。
图中显亮的部分就是所创建的旋转副(JOINT3)
图3-12
6)运用joint:
translational功能,建立滑块移动副
参数选择2Bod-1Loc和PickFeature。
在ADAMS/View工作窗口中先用鼠标左键选择滑块(PART_4),然后选择机架(ground),接着选择滑块上的PART4.BOX—3.V13,这时出现白色箭头,移动鼠标,使白色箭头的方向
与水平方向平行,如图3-13所示就是所创建的移动副(JOINT_4)
图3-13
7)施加力和力矩
运用appliedforce:
force,对滑块施加阻力100N。
torque,对曲柄AB施加驱动力200N。
添加完如图3-14
图3-14
四、模型的运动情况
点击主工具箱的仿真按钮,设置仿真终止时间仿真终止时间2s仿真工作步长50,然后点击开始仿真按钮,系统进行仿真,观察模型的运动情况
图4-1
五、运动曲线分析
方法:
曲柄作为参考对象,通过measure功能,可导出曲柄位移、速度、加速度、角速度、角加速度分别与时间关系图。
1,时间与X方向的位移关系
导出时间与X方向位移关系图时具体操作选项如下(以PART2为测量点):
时间与X方向的位移关系图5-1
2、时间与Y方向位移关系
时间与Y方向的位移关系图5-2
3、时间与速度关系
时间与速度关系图5-3
4、时间与加速度关系
时间与加速度关系图5-4
5、时间与角速度关系
时间与角速度关系图5-5
6、时间与角加速度关系
时间与角加速度关系图5-6
6、结果分析
将时间与X方向的位移,速度,角速度,加速度,角加速度,整合成一下。
 升级会员
升级会员 