最新电子大赛一等奖 悬挂运动控制系统2Word下载.docx
《最新电子大赛一等奖 悬挂运动控制系统2Word下载.docx》由会员分享,可在线阅读,更多相关《最新电子大赛一等奖 悬挂运动控制系统2Word下载.docx(16页珍藏版)》请在冰豆网上搜索。
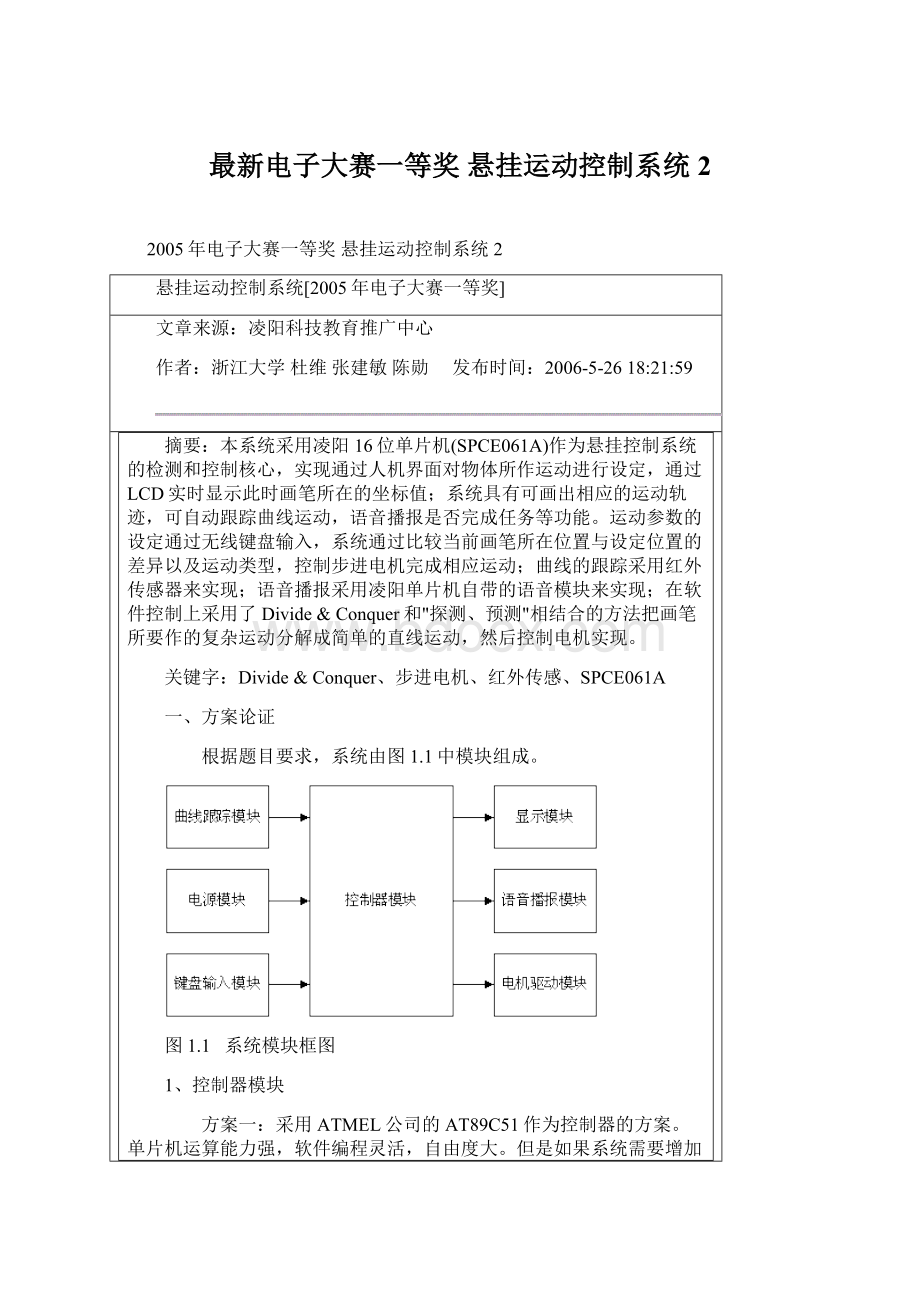
根据题目要求,系统由图1.1中模块组成。
图1.1
系统模块框图
1、控制器模块
方案一:
采用ATMEL公司的AT89C51作为控制器的方案。
单片机运算能力强,软件编程灵活,自由度大。
但是如果系统需要增加语音播放功能,还需外接语音芯片,实现较为复杂。
另外51单片机需要仿真器来实现软硬件调试,较为烦琐。
方案二:
采用SPCE061A单片机来实现,此单片机内置8路10位ADC和2路DAC,避免了外接A/D转换芯片和D/A转换芯片,并且I/O接口比较多,易于扩展外围电路,开发板集成了语音播报的硬件,通过软件编程即可以用于语音采集和播报。
集成开发环境中配有很多语音API函数,实现语音播放比较简单,另外方便的是该芯片内置在线仿真,编程接口,可以方便实现在线调试,这大大简化了系统的开发和调试的复杂度。
2、曲线跟踪模块
通过开关型霍尔传感器来实现,但是由于该方法只能跟踪磁性物质组成的曲线,成本高、安装起来比较麻烦,而且容易受环境中磁性物质的干扰,抗干扰性能不好。
通过红外传感器来实现,通过安装在所悬挂物体上的红外对管,检测在运动平面上用黑色笔所画的黑色曲线(或黑色胶布),由于黑色吸收发射管所发出的红外线,使接收管接收不到信号,系统通过接收管是否接收到发射管发出的测试信号,通过判断,用于控制步进电机的运动,实现起来简单易行。
3、语音播报模块
通过单片机来控制语音芯片来实现提示信息的播报。
但是由于语音芯片成本比较高,而且扩展起来比较复杂,增加焊接难度和设计成本。
如果控制器采用凌阳16位单片机SPCE061A,SPCE061A开发板自身集成有语音模块,不需要外围扩展,而且由于其集成开发环境自带的语音API函数库,可以减少开发难度和复杂度。
二、详细软硬件设计
经过上述的分析和论证,决定了系统各模块采用的最终方案如下:
(1)控制模块:
采用SPCE061A16位单片机;
(2)曲线跟踪模块:
采用红外传感器构成曲线跟踪模块;
(3)键盘模块:
采用315MHz无线键盘和编解码芯片;
(4)显示模块:
采用LCD构成显示模块;
(5)电机驱动模块:
采用2相的步进电机实现;
(6)语音播报模块:
采用SPCE061A16位单片机自带的语音模块;
(7)电源模块:
采用过滤,滤波,稳压等电路实现。
系统总的框图如图2.1所示,硬件连接图如图2.2所示。
图2.1
系统框图
图2.2
系统硬件连接图
1、硬件设计
(1)无线键盘单元的电路的设计
a)
发射模块
电路图如图2.3与图2.4所示。
图2.3
4路信号发射部分
编码部分采用PT2262芯片,输入是4路独立的二进制信号,可以用一个16-4编码电路扩展,组成16路的控制信号做为输入;
发射电路采用现在市场上用OOK实现的315M无线电发射模块。
图2.4
16-4编码模块与接口
按键功能安排如表2.1。
表2.1
按键功能表
键号
K0
K1
K2
K3
功能
输入“0”
输入“1”
输入“2”
输入“3”
K4
K5
K6
K7
输入“4”
输入“5”
输入“6”
输入“7”
K8
K9
K10
K11
输入“8”
输入“9”
模式转换
确认
K12
K13
K14
K15
左电机(上)
左电机(下)
右电机(上)
右电机(下)
b)
接收模块
电路如图2.5所示,接收部分也是采用现成的模块,完成OOK的315M信号的接收,该模块只需将电源和地接好,自己焊上天线,RES端就能完成将接受到的315M频率的OOK调制信号解调的功能,输出基带信号。
接收信号输入PT2272完成解码。
图2.5
无线接收解码模块
(2)红外传感模块的设计
电路如图2.6所示,采用了8对红外发射接收对管,分布成圆形,其中每个对管分别表示物体的上、下、左、右、左上、右上、左下、右下方位置,实现对曲线信息的跟踪。
图2.6
红外遥感模块
(3)LCD显示模块的单元电路的设计
本设计采用1602系列的LCD模块,电路图如图2.7所示。
图2.7
液晶显示模块
(4)步进电机模块的单元电路的设计
通过驱动电路控制两相步进电机的正转和反转,实现物体的上升和下降以及步进。
本设计中采用两相步进电机57BYG250,可以实现0.9度步进,易于控制其精度。
驱动电路采用HB202M模块,其原理为:
驱动模块可以采用12V~36V供电,CP端用于控制电机的步进,CP的上升沿信号使电机步进0.9度;
CW端用于控制电机的转动方向,输入高电平正向转动,低电平反向转动;
FREE端用于控制电机的锁定转矩,高电平电机不能保持锁定状态,低电平可以使电机停止转动。
电路如图2.8所示。
图2.8
步进电机驱动电路
(5)智能控制部分的单元电路的设计
采用以凌阳SPCE061为核心的单片机系统--SPCE061A精简开发板,利用其端口控制和中断能力,实现人机交互,控制对物体所作运动的设定和画出物体运动轨迹,同时控制实现LCD实时显示此时显示画笔所在的坐标值、自动跟踪任意曲线运动、语音播报是否完成任务等功能。
(6)语音模块电路的设计
由于SPCE061A精简开发板上已经集成语音录入和播放模块,而且集成开发环境下提供了语音函数库,使用起来方便易行,本系统直接采用该开发板的语音功能就可以了。
(7)电源模块的设计
由于电子电路在多数情况下都需要用直流电源供电,而电力部门所提供的是50Hz的交流市电,所以需要把交流电经过整流,变成单向脉冲电流,通过滤波器去除脉动成分,变成需要的直流电源后,才可以使用。
为了保证电子电路的稳定可靠的工作,还需要对直流电源实施采取稳压措施。
电源模块的电路图如图2.9所示。
图2.9
电源模块
2、软件设计
总的工程程序包括初始化程序、无线键盘查询程序、步进电机控制程序等部分。
(1)主程序流程
图2.10
主程序流程图
(2)初始化程序流程
初始化的I/O口包括LCD所用端口、无线键盘输入端口、红外位置传感器输入端口和电机驱动输出端口;
初始化状态变量包括驱动任务、当前位置坐标等;
允许IRQ4中断,是因为在此中断中进行电机任务处理。
程序流程图如2.11。
图2.11
初始化程序流程图
(3)步进马达控制流程(Divide&
Conquer)
系统采用Divide&
Conquer的策略,将任意的复杂运动分解为折线运动,设计的控制系统实际上是完成一个一个的直线运动,再用相应的合成方式组合成任意的复杂运动。
对于直线运动,又将其分解最小直线单位运动,由X轴方向和Y轴方向运动的合成。
综合下选择步进基本单位为0.5毫米。
如图2.12。
图2.12
Divide&
Conquer的策略
在用最小直线单位运动组成一条长直线运动时,采用追击的算法,即每完成一个最小直线单位运动,重新计算当前到达点和目标点的斜率,在当前点的实际坐标基础上向目标点做最小直线单位运动移动,这样的好处是不会累计误差,同时能平滑锯齿现象。
对于圆之类的图形,先用几何的方法分解为一条一条直线,存入任务列队中,然后用上述算法逐条实现即可。
电机中断服务程序流程图如图2.13。
图2.13
电机中断服务程序流程图
(4)无线键盘查询流程
无线键盘的工作原理在前面已经介绍,只要接收到键值相应电平就会置高,数据位变为接受到数据的编码,这时单片机根据编码数据就可以判断是哪个按键;
单片机判断按键后根据表2.1的功能进行任务处理,处理程序流程图如图2.14。
图2.14
无线键盘查询处理程序
(4)自动跟踪模式流程图
程序流程图如图2.15所示。
图2.15
自动跟踪模式流程图
三、测试说明
1、转轮周长的测量
(1)测试仪器:
卷尺:
量程5m。
(2)测试方法
用测试程序控制转轮转动5周,然后测其总周长,然后求其平均值。
(3)数据的记录
表3.1
转轮周长测量数据
初始长度cm
122.35
105.65
130.55
平均值
转动5周后cm
28.40
12.25
36.30
5周总长度cm
93.95
93.40
94.25
98.67
(4)测试结果
平均周长98.67/5=18.773cm
2、自行运动情况测试
(1)测试仪器
秒表,直尺,坐标纸。
(2)测试方法和步骤
由于系统具有根据设定自由运动的功能,通过设定悬挂物体所要经过的点,然后对比设定值和悬挂体实际所到点的坐标值,分析系统相应误差,同时由秒表记录完成相应运动所需的时间,完成相应的记录。
(3)测试数据记录
表3.2
自行运动测量数据
序号
X坐标设定cm
Y坐标设定cm
实际X坐标cm
实际Y坐标cm
X轴误差cm
Y轴误差cm
1
40
0
0.2
2
75
74.3
0.7
3
50
74.6
50.0
0.4
4
100
75.1
99.0
0.1
5
39.5
97.5
0.5
2.5
6
-0.6
100.0
0.6
7
49.8
50.7
8
9
-0.1
X坐标的平均误差为:
(0+0.7+0.4+0.1+0.5+0.6+0.2+0.2+0.1)/9=0.31cm
Y坐标的平均误差为:
(0.2+0.2+0+1+2.5+0+0.7+0+0.1)/9=0.52cm
(4)测试结果分析
在Y方向的误差,到了(40,100)点,由于此时两条绳
 升级会员
升级会员 