三相逆变器的建模Word文档格式.docx
《三相逆变器的建模Word文档格式.docx》由会员分享,可在线阅读,更多相关《三相逆变器的建模Word文档格式.docx(10页珍藏版)》请在冰豆网上搜索。
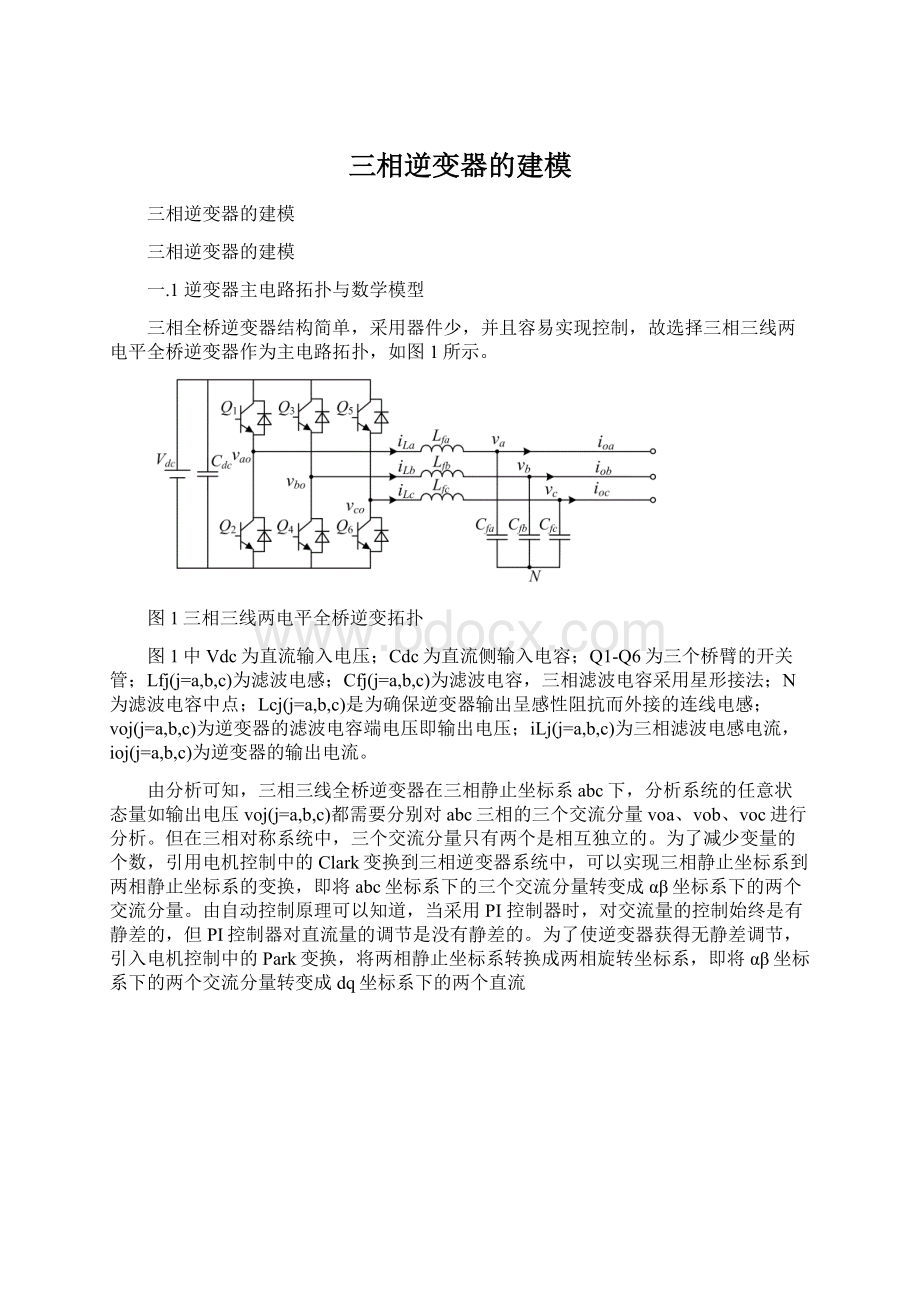
iLj(j=a,b,c)为三相滤波电感电流,ioj(j=a,b,c)为逆变器的输出电流。
由分析可知,三相三线全桥逆变器在三相静止坐标系abc下,分析系统的任意状态量如输出电压voj(j=a,b,c)都需要分别对abc三相的三个交流分量voa、vob、voc进行分析。
但在三相对称系统中,三个交流分量只有两个是相互独立的。
为了减少变量的个数,引用电机控制中的Clark变换到三相逆变器系统中,可以实现三相静止坐标系到两相静止坐标系的变换,即将abc坐标系下的三个交流分量转变成αβ坐标系下的两个交流分量。
由自动控制原理可以知道,当采用PI控制器时,对交流量的控制始终是有静差的,但PI控制器对直流量的调节是没有静差的。
为了使逆变器获得无静差调节,引入电机控制中的Park变换,将两相静止坐标系转换成两相旋转坐标系,即将αβ坐标系下的两个交流分量转变成dq坐标系下的两个直流
将三相静止坐标系中的变量变换到两相静止坐标系下,如图2所示。
图2Clark变换矢量图
定义坐标系中轴与abc坐标系中a轴重合,根据等幅变换可以得到三相abc坐标系到两相坐标系的变换矩阵:
(6)
联立式(5)与式(6),可以得到微电网储能逆变器在坐标系下的数学模型:
(7)
从式(7)可以看出,与三相静止坐标系下模型相比,减少了一个控制变量,而各变量仍然为交流量,控制器的设计依然比较复杂。
一.1.1在dq同步旋转坐标系下的数学模型
根据终值定理,PI控制器无法无静差跟踪正弦给定,所以为了获得正弦量的无静差跟踪,可以通过Clark和Park变换转换到dq坐标系下进行控制。
dq两相旋转坐标系相对于两相静止坐标系以的角速度逆时针旋转,其坐标系间的夹角为,图3给出了Park变换矢量图。
图3Park变换矢量图
Park变换矩阵方程为:
(8)
联立式(7)和式(8)可得微电网储能逆变器在dq坐标系下的数学模型:
(9)
在两相旋转坐标系下电路中控制变量为直流量,采用PI控制能消除稳态误差,大大简化了系统控制器的设计。
但是,由于dq轴变量之间存在耦合量,其控制需要采用解耦控制,解耦控制方法将在下节介绍。
一.1.2解耦控制
从式(9)可以看出,dq轴之间存在耦合,需要加入解耦控制。
令逆变器电压控制矢量的d轴和q轴分量为:
(10)
其中,分别是d轴和q轴电流环的输出,当电流环采用PI调节器,满足:
(11)
,分别是电流PI调节器的比例系数和积分系数,,分别为d轴和q轴的参考电流,,分别为d轴和q轴的实际电流采样。
把公式(10)代入公式(9)可得:
(12)
由式(12)可以看出,由于在控制矢量中引入了电流反馈,抵消了系统实际模型中的耦合电流量,两轴电流已经实现独立控制。
同时控制中引入电网电压前馈量和,提高了系统对电网电压的动态响应。
图4是电流解耦控制框图。
解耦方法为在各轴电流PI调节器输出中加入其他轴的解耦分量,解耦分量大小与本轴被控对象实际产生的耦合量大小一致,方向相反[]。
图4电流解耦控制图
对公式(12)进行拉普拉斯变换,同时把公式(11)代入公式(12)可得:
(13)
在采用解耦控制之后,d轴电流和q轴电流分别控制。
图5给出电流内环的结构框图。
图5电流内环结构框图
其中,为电感电流采样周期,和对应电流环的PI参数,代表PWM控制产生的惯性环节[],代表电流采样的延迟[]。
为调制比,由于本文空间矢量调制(SpaceVectorPulseWidthModulation,SVPWM),调制过程中引入了直流电压的前馈环节,所以可以表示为:
(14)
本系统开关频率和器件参数为:
,,,。
由于d轴和q轴电流环完全对称,所以本文只分析d轴电流环的设计过程。
由于合并小惯性环节并不会影响系统低频特性,可以将错误!
未找到引用源。
化简,得到图6。
图6d轴电流环简化结构框图
一.2电压电流双环设计
一.2.1电流环设计
由上述分析可知,在环路设计时可以对d轴电流和q轴电流分别进行控制[],从而可以得到如图7所示的电流环控制框图。
图7电流环控制框图
其中,Kip和Kii对应电流环的PI参数,Ts为电流内环采样周期,1/(1+Tss)和1/(1+0.5Tss)分别代替电流环信号采样的延迟和PWM控制的小惯性延时环节[]。
本文设计的系统参数如下:
L=1.5mH,R=0.1Ω,C=50μF,Ts=1/fs=1/15kHz=66.7μs。
由于d轴与q轴的电流环类似,故以d轴电流环为例进行分析。
补偿前电流环的开环传递函数为:
(15)
补偿网络的传递函数为:
(16)
直流增益20lg|Gc0(s)|=20dB;
幅频特性的转折频率为100Hz,设定补偿后的穿越频率为1/10的开关频率,即1500Hz。
则有:
(17)
若加入补偿网络后,系统回路的开环增益曲线以-20dB/dec斜率通过0dB线,变换器具有较好的相位裕量。
由于补偿前的传递函数在中频段的斜率已经为-20dB/dec,因此补偿网络在1500Hz时斜率为零。
将PI调节器的零点设计在原传递函数的主导极点转折频率处,即100Hz处。
令:
(18)
联立式(17)及式(18)可得电流环的PI参数:
Kip=18,Kii=1200。
实际取值:
Kip=10,Kii=1200。
图8电流环补偿前后的波特图
图8所示为电流环补偿前后的波特图。
可以看出,补偿前电流环的开环传递函数Gc0(s)在低频段的增益为20dB,并且在100Hz时穿越0dB线,相位裕度为75°
;
加入补偿环节后,电流环的闭环传递函数Gil(s)其幅频特性曲线在1000Hz处以-20dB/dec斜率通过0dB线,相位裕度为60°
。
补偿之后回路的开环传递函数为:
(19)
因此,补偿之后电流环的闭环传递函数为:
(20)
一.2.2电压环设计
电压外环主要是保证输出电压的稳态精度,动态响应相对较慢。
设计电压外环时,可以将电流内环看成一个环节,其控制框图如图9所示。
补偿前系统的开环传递函数为:
(21)
图9电压环控制框图
PI调节器的传递函数为:
(22)
将电压环的穿越频率设计在150Hz左右。
由于Gv0(s)的幅频特性在150Hz处的斜率为-20dB/dec,因此需要设计PI调节器的零点在小于200Hz处,文中取为150Hz。
同理参照电流环设计方法,可以得到:
(23)
并且
(24)
根据式(23)和式(24),得出电压环的PI参数为:
Kvp=20,Kvi=0.06。
画出初始的传递函数、补偿网络及补偿后系统的开环传递函数Bode图如图10所示。
由图10可以看出,补偿前原始回路增益函数Gv0(s)在2kHz时穿越0dB线;
加入补偿网络之后,由图10可知,幅频特性在150Hz处以-20dB/dec斜率通过0dB线,相位裕度为55°
在实际调试过程中,PI参数进行了适当的调整,使系统能够得到最优化。
图10电压环补偿前后的波特图
 升级会员
升级会员 