乐高机器人齿轮篇Word下载.docx
《乐高机器人齿轮篇Word下载.docx》由会员分享,可在线阅读,更多相关《乐高机器人齿轮篇Word下载.docx(15页珍藏版)》请在冰豆网上搜索。
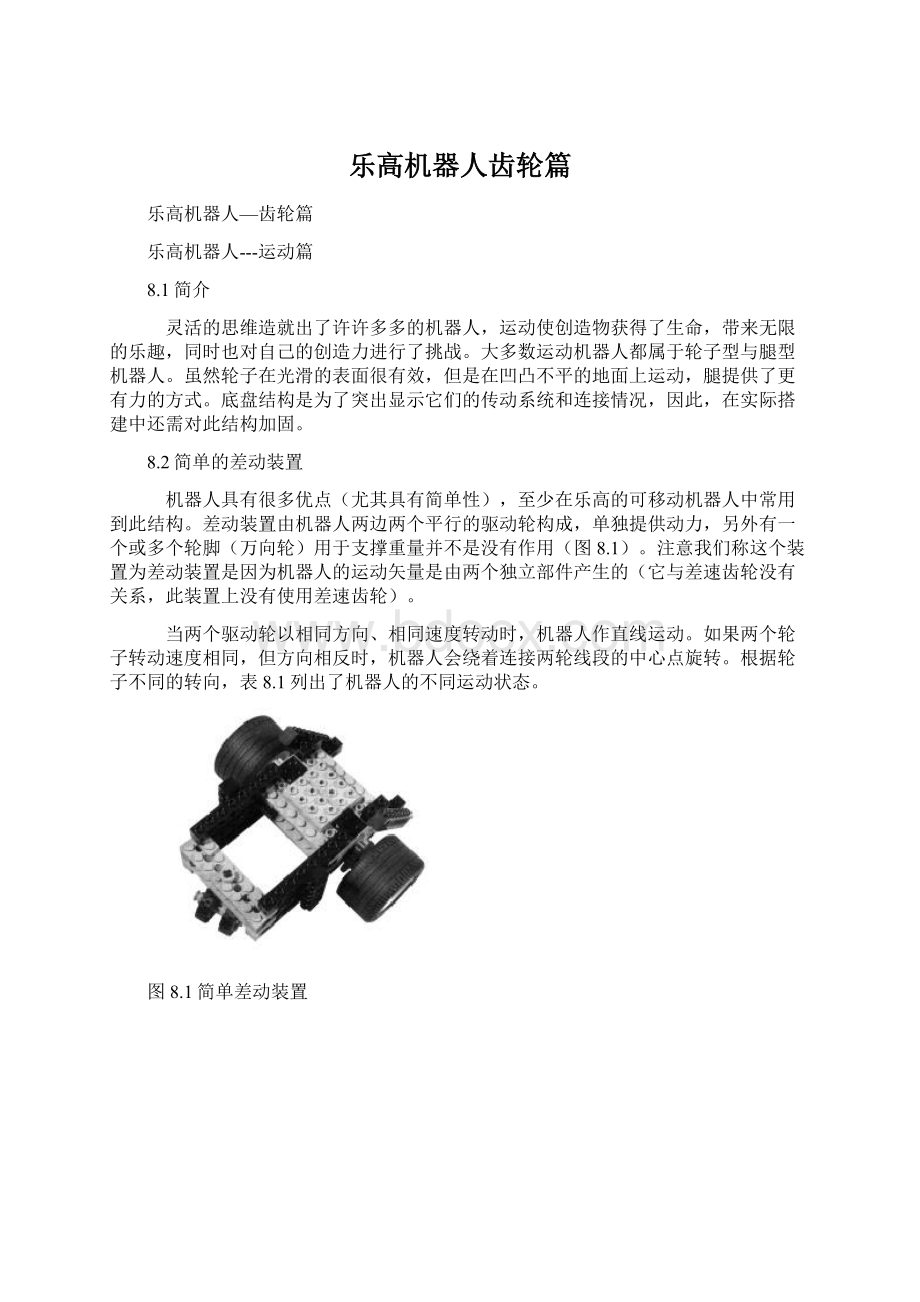
如果两个轮子转动速度相同,但方向相反时,机器人会绕着连接两轮线段的中心点旋转。
根据轮子不同的转向,表8.1列出了机器人的不同运动状态。
图8.1简单差动装置
图8.2使用单个角度传感器观察左右轮速度的差别
一个更基本方法是你在需要走直线时,同时锁住两个轮子,此系统非常有效的使你的机器人走直线。
它需要第三只马达来控制制动系统,同时也需要附加传动系统简化制动结构。
图8.3展示了具有特殊部件制动机构的示例:
暗灰色带离合器16齿齿轮,传动驱动环和传动转变钩,这种特殊的齿轮,用圆形洞取代了普通的十字型洞,使得它能够在轴上自由转动,驱动环将被安装在轴上。
当你把驱动环与齿轮套在一起时(使用转变钩)齿轮与轴连在一起了。
图8.3可制动差动装置
你也可使用图8.2展示的结构,用马达取代角度传感器,回顾第四章马达能当作制动器使用:
在马达关闭状态,会阻止运动,在float状态马达仍无动力,但可以自由转动。
因此不要给马达提供动力,把它当作制动器来制动差速齿。
在关闭状态下制动马达,差速齿很难转动,从而使你的机器人沿直线前进,另一方面float状态使用马达,差速齿转动,机器人能够转弯,表8.2介绍了一些可行的组合。
当左右马达以不同的方向运行时,差动齿轮锁马达必须处于float状态
图8.4带16齿齿轮离合器,传动操纵环,传动转变钩
表8.2电动差动齿轮锁机器人如何控制差动装置
左马达
右马达
差动制动马达
机器人状态
停止
保持静止
向前
向前运动
向后
浮动
原地顺时针转动
原地逆时针转动
向后运动
考虑到马达在浮动状态下时也存在着重大的机械阻力,所以机器人将不能快速转弯,驱动马达在转弯时将负荷更大的重力。
使用小角轮走直线
小角轮是差动装置平滑移动和转弯的又一个关键因素,通常我们会忽略这一点,LEGOConstructopedia提出图8.5所示的小角轮结构,但是小角轮设计上还存在着欠缺,它在一根轴上使用了两个轮子,在第二章中你已经知道此结构的轮子不能独立转动。
按照图表搭建此结构,试着让它转一个急弯,它的效果不是很好,为什么?
事实上,除非你使其中的一个轮子打滑,否则它就不能转动。
图8.5小角轮结构
图8.6中的小角轮的结构有了一定的改进,左边的结构使用了单轮彻底避免了问题的出现。
右边的结构更可靠,它使用了两个自由轮允许小轮在原地转弯避免了磨擦与打滑的问题,两种结构的区别在轮轴、在左边结构中,轴与轮子同时旋转,而在右边的结构中,轮在轴上转动。
图8.6避免打滑的角轮
选择使用一个或更多角轮要根据机器人的功能,独角轮适用于多种场合,而双角轮安放在机器人的前方或后面是保持稳定性的好方法。
在一些场合,当在平滑的表面上控制重量轻,结构简单的机器人可以用圆形垫块或其它与接触面磨擦力很小的部件替代独角轮(图8.7)。
图8.7圆形垫块
8.3搭建双差动装置
双差动装置是对简单差动机构的一个改进结构,主要从机械结构上解决走直线的问题,并使用了两个马达(参考图8.8)。
它的传动链有些复杂,依靠差动齿轮-使用两个更精确。
图8.8双差动装置
双差动装置是差动齿轮的另外一种用法,通常轮子是连接在从差动齿轮延伸出来的轴上,然而在此结构中,轮子通过齿轮连接在差动齿轮的外齿。
在第四章中我们阐述了差动齿轮能够在机械上对两个独立的运动作加或减法运算,为了实现这个方法,用差动齿上延伸的轴作为输入,且差动齿轮本身将根据差动齿轮内部的代数和来运动(两个运动方向的代数叠加)。
在此结构中,两个马达为两个差动齿轮提供动力,特点其中一个马达同向带动差动齿轮的输入轴。
另一个马达以相反的方向驱动第三根输入轴,要控制双差动装置,只需使用其中一个马达,让另一个马达关闭。
在图8.9中所示的结构与图8.8中的结构相同,只不过没有马达,当1号马达带动40齿齿轮A转动时,2号马达使齿轮B保持静止,运动沿着虚线传递(由图示)。
两个差动装置同时转动,机器人沿直线向前,另一方面,1号马达停止,则齿轮停止,当2号电机转动,带动B将动力沿着实线传递。
差动装置同速不同向旋转,结果是机器人在原地转动。
图8.9双差动装置剖面图
通常不同时使用两个马达,一个马达用于走直线,另一个马达用于转弯,如果根据马达的方向同时驱动两个马达也没关系,因为两个差动齿其中一个会抵消两个相反的输入,保持静止,而另外一个差动齿对两个输入进行相加,从而使得速度提高一倍,此时,机器人绕着静止轮转动。
双差动装置一个非常好的特性是使用一个角度传感器就可以精确的检测机器人的运动类型。
将传感器连接到其中一个轮上,当机器人直线运动时,使用传感器来测量运动的距离,当机器人转弯时,用传感器测量方向的改变量。
当然我们仍要牢记在机械结构有得必有失,换句话说,这种具有独创性的结构有它的缺点。
首先是它非常复杂,我们展示了结构的平面图可以更容易理解它们的配合,然而你自己也可使用多种传动机构构建简易的机器人(可能仍需一些齿轮或者是更少的),这种复杂的传动装置导致产生了负面影响:
磨擦力
4搭建滑动转向装置
滑动转向装置是差动装置的一种变化形式,通常用于履带式车辆,但有时也用于四个或六个轮子的形式。
对于履带的车辆,唯一的驱动设计就是滑动转向装置。
在现实生活中,挖土机和一些除草机是使用这种装置的最好例子。
图8.10展示了一个简单的滑动转向装置,每一个履带都由单独马达提供能量,由一个8齿轮与一个24齿轮啮合,并连接在履带轮上,履带前轮不需驱动。
带轮滑动转向装置需要一个有效的装置,将动力传到所有的轮子上,否则机器人不能顺利转弯或者不能转弯。
图8.11中的模型每侧使用五个24齿轮啮合,它们像履带那样从每个马达那里获得动力,每一个轮轴用于安装齿轮,这些齿轮都被用于传递运动的惰性齿轮分隔,如果有足够的24齿齿轮,你可以组合成此结构,图片中的圆形轮胎由补充套装提供。
图8.11带轮滑动掌舵装置
履带机器人搭建简单且动作有趣,因此,许多乐高爱好者都采用此结构。
与差动装置比较而言,当两条履带以同向运行时机器人向前行进,方向或速度上有差别就会使机器人转弯,原地转弯也有可能实现。
滑动转向装置也具有差动装置驱动机器人走直线所具有的缺点。
最后总结滑动转向装置的特点:
■
在粗糙的地面上履带与轮子相比,履带更易控制然而它不太租用光滑的表面
履带结构产生了更大的摩擦力耗费了马达提供的部分动力。
在利用机器人运动进行定位时,这种结构的机器人是不适合定位的,因为它们不能避免本身具有的缺陷:
产生滑动。
8.5搭建转向装置
转向装置是用于各种车型的标准结构,由两个前转向轮和两个固定后轮构成,它也适用在机器人身上使用。
你可以驱动后轮或者前轮或者是四只轮子,利用乐高来实现这个方法非常简单,这也是为什么要介绍它的原因。
尽管它比差动装置的通用性要差,并且不能在原地转弯或急转弯,但此结构也有很多优点:
易实现沿直线行走,且在粗糙路面上行走具有较高稳定性。
当使用机器人基本套装搭建转向装置时,只有一个马达驱动轮子,因为你需要其它的装置转动前轮,因此你的转动装置需要有差动机构一半的动力,才能使你的机器人良好的沿直线行走。
图8.12、8.13展示了二个简单的转向机构,除动作细节外,这两个模型具有相同的结构特性。
例如:
后轮都是通过一只差动齿轮与驱动马达相连,在第二章中我们阐述过如果想让机器人转弯,就必须使用差动。
辅助马达掌握前轮控制机器人的行进方向。
注意我们使用了一只带子来驱动转向机构,主要是利用它的极限扭转来避免能力过程中损伤机械结构或马达。
你最好添加一只传感器侦测转向轮的位置,更好的控制机器人的方向。
当转向装置转动时至少也要一只触动传感器。
在转完后你可使用定时方式或传感器使机器人再变为先前的行进方向。
图8.12转向装置
图8.13另一种转向装置
方法与技巧
使用梯形转向机构(阿克曼转向机构)
现实中使用转向机构的车都是根据梯形转向机构的原理进行设计的(阿克曼为此装置的首创人)。
我们在前面设计的转向轮转动的角度相同,但这个机构就不是这样的,在转弯时,内轮的转角比外轮的大。
里面的轮子比外部的轮转弯急。
在大半径的转弯中差别很小,可忽略。
在急转弯中此差别变得相当明显且容易使内轮锁死。
阿克曼转向机构在设计上补偿了内轮转角的差别,因此解决了普通转向机构的缺点。
这个理论说明了当从轮子延长的线交于一点时,车就能平稳的转动并且始终围绕这一交点转动(图8.14)
图8.14阿克曼转向机构:
内部轮比外部轮转弯急
使用乐高搭建建阿克慢结构是可行的,在14章将有对前轮驱动更进一步的说明。
图8.12与8.13中两种模型都使用了齿轮齿条转向机构,一个8齿齿轮(小齿轮)与一个带齿的特殊板(齿条)相啮合,它们不同之处是后一种我们使用了一种特殊部件:
三块1x10板,两个转向臂和两块光滑平板。
将这些组件设计成一个组合部件,创造出一种使用更简易的使用在许多乐高工艺车、卡车模型上的转向装置。
8.12模型只使用了机器人套装的基本部件,必须要使用2x8的板替换1*10板,用自制的去替换转向臂。
此结构整个前面部分都是由梁搭建起来的,用于支撑轮子和转向机构,但通常还需要一个光滑的表面用于齿条滑动。
当你建好这个装置后,把轮子移到枢轴后面变成一个自定心转向机构(在很多情况下的一种明显的特性)。
在图8.15中的a图,轮子装在枢轴下面,这样不会影响它的转向。
如果轮子装在转向柱的后面,轮子摩擦引起车的动态向前运动从而推动轮子向后运动,产生自定心的动作。
观察购物车的结构你就知轮子为什么装在中轴上,把轮子越往枢轴后面移动,如图B、C,就越容易产生自定心。
不要把轮子装在枢轴的前面,如图d,会引起转向机构不稳定。
事实上,轮子会向后走使你的车子自然转弯。
图8.15移动中轴线上的轮子
自己搭建一个简单的底盘去探索图8.15中各种结构的特性。
转向装置十分适用于粗糙的表面,因为它有四个轮胎非常平稳,你可以使用其它的方法改善此结构。
另外重要一点是此结构没有一个驱动轮会长期离地,否则差动机构将会把所有动力传递到阻力最小的轮子上,结果导致轮子打转,使你的机器人变得不能运动。
使用皮带与皮带轮把普通附加轴与轮轴连接在一起组成一个无滑差动机构能够大大减少上述的问题。
皮带能够保持驱动轴以同速转动,然后在转弯过程中它们会在皮带轮上发生打滑现象以便调整轮子的速度。
将一只轮子脱离地面皮带也会将大部分能量传递到其它轮子上。
图8.16无滑差动机构
8.6搭建一个三轮装置
三轮装置由一个用于驱动和转弯的前轮及两个保持稳定的独立后轮组成(图8.17)。
三轮驱动装置的独特之处在:
前轮既作为驱动又作为转向装置,使机器人的活动更灵活
 升级会员
升级会员 