运动控制系统仿真实验讲义全Word格式文档下载.docx
《运动控制系统仿真实验讲义全Word格式文档下载.docx》由会员分享,可在线阅读,更多相关《运动控制系统仿真实验讲义全Word格式文档下载.docx(23页珍藏版)》请在冰豆网上搜索。
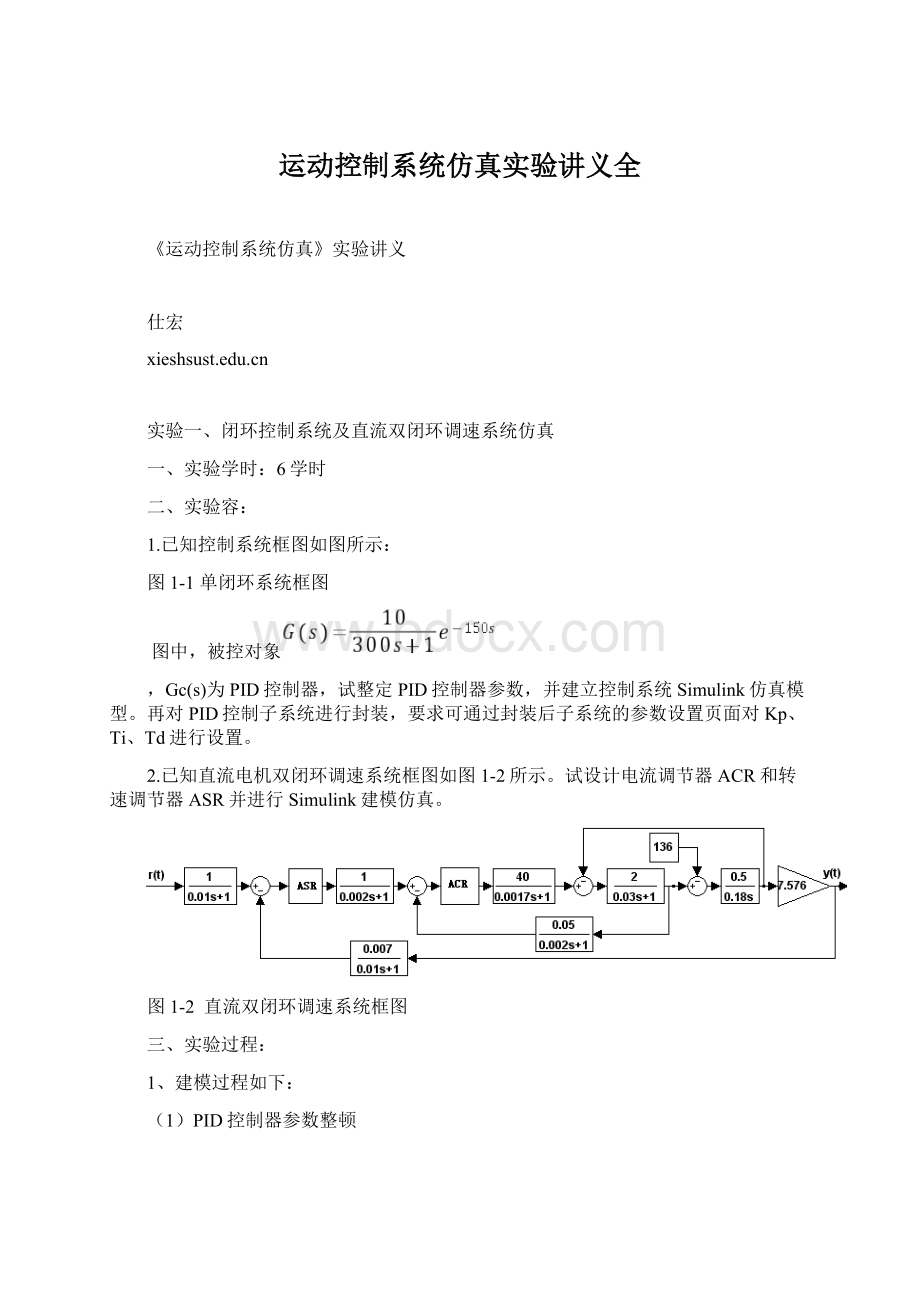
2.已知直流电机双闭环调速系统框图如图1-2所示。
试设计电流调节器ACR和转速调节器ASR并进行Simulink建模仿真。
图1-2直流双闭环调速系统框图
三、实验过程:
1、建模过程如下:
(1)PID控制器参数整顿
根据PID参数的工程整定方法(Z-N法),如下表所示,Kp=
=0.24,Ti=
=300,Td=
=75。
表1-1Z-N法整定PID参数
控制器类型
由阶跃响应整定
由频域响应整定
Kp
Ti
Td
P
无
PI
PID
(2)simulink仿真模型建立
建立simulink仿真模型如下图1-3所示,并进行参数设置:
图1-3PID控制系统Simulink仿真模型
图1-3中,step模块“阶跃时间”改为0,TransportDelay模块的“时间延迟”设置为150,仿真时间改为1000s,如下图1-4所示:
图1-3PID控制参数设置
运行仿真,得如下结果:
图1-5PID控制运行结果
(3)PID子系统的创建
首先将参数Gain、Gain1、Gain三个模块的参数进行设置,如下图所示:
图1-6PID参数设置
然后建立PID控制器子系统,如下图1-7所示:
图1-7PID子系统
再对PID子系统进行封装,选中“Subsystem”后,单击鼠标右键,选择“Masksubsystem”,弹出封装编辑器,并进行相应参数设置,如下图1-8、1-9所示,
图1-8PID子系统封装文本显示
图1-9PID子系统封装参数设置
在对图1-9所示封装变量设置完成后,封装后的PID子系统如下图1-10所示
图1-10封装后PID控制仿真模型
双击图1-10中的PID子系统,按图1-11作参数设置,即可完成PID参数设置。
图1-11PID控制器参数设置
封装后运行仿真,结果如图1-12所示:
图1-12封装后系统运行结果
2、建模方法:
图1-2中r(t)为给定输入,采用阶跃信号。
Y(t)为系统输出,表示直流电机的转速。
ASR为转速调节器,由PI调节器组成。
ACR为电流调节器,也是一个PI调节器。
根据直流双闭环调速系统工程整定方法,进行ASR和ACR的参数整定时,首先断开转速环,整定电流调节器ACR。
然后接通转速环,整定转速环ASR,同时调节电流环参数。
根据上述分析,首先建立直流双闭环调速系统的高层仿真模型,其中转速调节器和电流调节器由空白子系统组成,如图1-13所示。
图2-1直流双闭环调速系统Simulink仿真模型
图1-13中给定速度输入信号R(t)由信号源模块库的Step(阶跃)信号生成,通过改变阶跃信号的幅值,可以改变双闭环调速系统给定输入电压,其变化围为-10V~10V。
负载电流信号IL也由阶跃信号生成,通过改变阶跃输入信号的幅值和时间,可观察系统在不同负载下的转速响应。
输入滤波环节
、转速反馈环节
、电流反馈环节
、转速调节器输入滤波环节
及其他模块为传递函数描述的数学模型,在Simulink仿真中,可使用Continue(连续系统)模块库的TransferFcn模块实现。
增益模块可以使用Math(数学)模块库的Gain来实现。
转速调节器ASR和电流调节器ACR首先由两个空白子系统组成,结果如图1-13所示。
下面对转速调节器ASR和电流调节器ACR进行设计,结果如图1-14和图1-15所示。
对图1-14和图1-15所示的子系统进行封装,可得如图1-16所示的结果。
利用工程整定及Simulink动态调试的方法,对转速调节器和电流调节器进行参数整定,参数结果如图1-16所示。
图1-14转速调节器子系统Simulink模型图1-15电流调节器子系统Simulink模型
图1-16转速调节器ASR与电流调节器ACR封装后参数设置对话框
Simulink求解器取系统默认值,运行仿真可得如图1-17所示的转速、电流响应曲线及图1-18所示的转速调节器输出和电流调节器输出。
从仿真结果可以看出,电流、转速响应达到工程设计要求。
图1-17直流双闭环调速系统电流及速度响应
图1-18转速调节器及电流调节器输出
试验二、交-直-交变频调速系统仿真分析
6
1、建立三相桥式不可控整流电路,带10欧姆电阻负载,观察输入电流,输出电压波形。
并对输入电流作谐波分析。
2、建立PWM逆变电路仿真模型,在带三相对称的纯电阻负载时,每相电阻10欧姆,观察输出50Hz时的电压波形,并对比不同载波频率下输出电压谐波分量。
3、将1和2中的整流和逆变电路连接起来,构建完整的交-直-交变频调速系统仿真模型。
4、带15kw电机负载。
负载转矩20Nm。
观察50Hz下电源侧输入电流波形及谐波含量;
观察频率由25Hz变换到50Hz时电机输出转速及电磁转矩的波形。
三、实验步骤:
1、建立三相桥式不可控整流电路,带10欧姆电阻负载,观察输入电流,输出电压波形。
三相桥式整流电路建模如下
(1)构建仿真模型
图2-1三相桥式全控整流电路
(2)设置仿真参数
图2-2三相电源参数设置
图2-3通用桥模块参数设置
图2-4电阻模型参数设置
图2-5电流示波器参数设置
仿真最大步长设置为0.0001,仿真时间设置为0.2s,运行仿真,输入a相电流波形如下图2-6所示:
图2-6三相桥式不可控整流输入A相电流波形
单击Powergui模块,再弹出的窗口中单击FFT“Analysis”菜单按钮,打开傅立叶分析窗口,如图2-8所示。
图2-7Powergui模型
图2-8傅立叶分析窗口
按图2-8所示设置参数,按后单击“Display”按钮,即可完成对Ia电流信号的谐波分析。
总谐波电流含量30.42%。
建立PWM逆变电路如下图2-9所示
图2-9PWM逆变电路仿真模型
图中模块参数设置:
图2-10直流电源模块和电阻负载模块参数设置
图2-11通用桥模块参数设置
图2-12PWM发生器模块参数设置
图2-13电压示波器参数设置
图2-13电流示波器参数设置
将仿真算法改为ode15s,仿真时间改为0.4s,最大仿真步长改为0.00001s,运行仿真,可得电压电流波形如下:
图2-14PWM逆变电路相电流及相电压/线电压波形
单击Powergui模块,再单击FFTAnalysis按钮,进行谐波分析:
图2-15A相电流谐波分析
图2-16线电压UAB谐波分析
改变PWM逆变模块参数设置,再次仿真并分析电流谐波含量.
图2-17PWM发生器模块参数改动前后对比
图2-18输出线电压谐波分析
3将1和2中的整流和逆变电路连接起来,构建完整的交-直-交变频调速系统仿真模型。
图2-19AC-DC-AC电路仿真模型
将图2-19中电容C的参数由1e-3改为1e-2,观察改变前后直流环节的电压电流。
再观察输入交流电流波形。
图2-20直流环节电流、电压波形(电容C=0.001F)
图2-20直流环节电流、电压波形(电容C=0.01F)
图2-21交流电源输入电流波形
试分析图2-21的原因,并改善电流波形。
4将三相纯电阻负载换为三相交流异步电动机,建立变频调速系统仿真模型,如下图所示。
AC-DC-AC变频调速系统仿真模型
电机模块参数设置
电机测量模块参数设置
图电机转速及转矩响应
 升级会员
升级会员 