铁路道口远程控制系统解决方案样本.docx
《铁路道口远程控制系统解决方案样本.docx》由会员分享,可在线阅读,更多相关《铁路道口远程控制系统解决方案样本.docx(16页珍藏版)》请在冰豆网上搜索。
铁路道口远程控制系统解决方案样本
1铁路道口现状
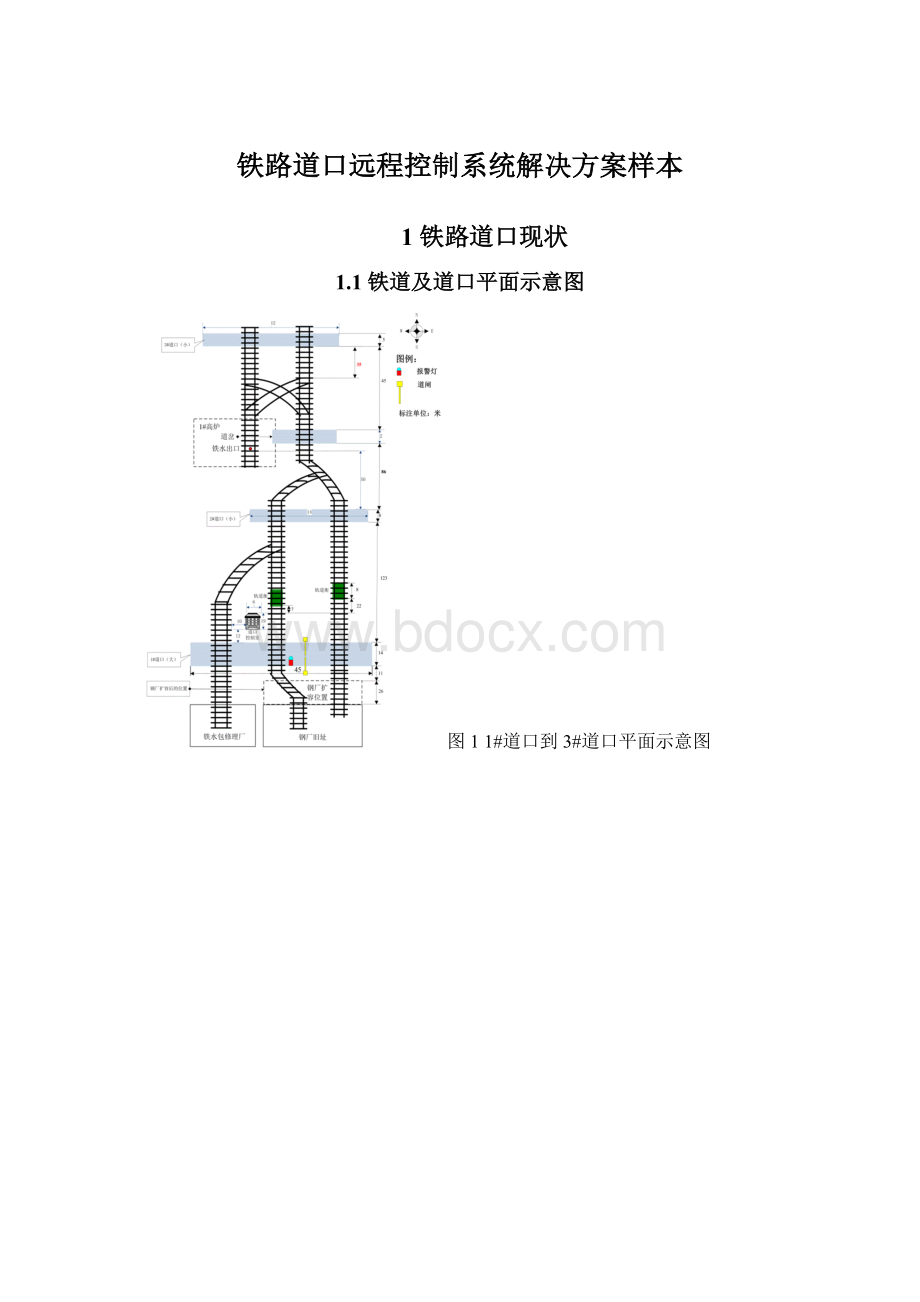
1.1铁道及道口平面示意图
图11#道口到3#道口平面示意图
图23#道口以北平面示意图
1.2各个道口基本情况
1.2.11#道口
1#道口指1#高炉与炼钢厂之间的大道口。
机动车和人均允许经过。
当夏天雨季来临时,1#道口附近的铁轨会严重积水,铁轨表面就会布满水,清理水需要5~6小时。
1#道口附近的值班室,共三个房间:
道口值班室、轨道衡值班室、火车调度值班室。
当前,1#道口因施工停止经过。
2月份后,炼钢厂需要向北扩,与轧钢厂的位置平齐,靠1#道口比较近(具体距离见后面的道口平面图);炼钢厂北移后,炼钢厂北面原中间位置的轨道向东移,因此,该轨道从炼钢厂出来后将变直。
炼钢厂北扩后,天车吊铁水罐的位置也会向北移20多米。
粗略估计,当火车头卸下铁水罐,离开一段距离停止时,火车头离道口只有5~6米。
在炼钢厂内,2条铁道是分开的,而且西边轨道比东边的长10多米。
1.2.22#道口
2#道口(小):
指1#高炉与炼钢厂之间的小道口,主要经过铲车,上露天料;一般不允许其它机动车通行;允许人走。
1.2.33#道口
3#道口(小):
指1#高炉与2#高炉之间的小道口,主要是人行道口,不走机动车。
1.2.44#道口
4#道口:
指2#高炉与3#高炉之间的大道口,机动车和人均允许经过。
当前声光报警器和道闸均配备,最为繁忙。
1.2.55#道口
5#道口:
指3#高炉与4#高炉之间的道口。
只经过铲车上露天料,一般不允许经过其它机动车;允许人通行。
1.3道口设备参数和运行情况
1.3.1主要道口设备参数
●道口设备道闸控制:
电源220VAC,道口电控箱控制,抬/落杆时间均为5秒。
(经过改造后,可使用开关量控制。
)
●报警器规格:
电源36VAC,采用100W灯泡。
●道口的电源都是来自于附近的高炉,均为220VAC。
1.3.2主要道口设备(1#、4#)运行情况
道口报警与道闸动作的时间关系为:
●火车头(或尾)接近道口50米左右时,火车司机经过对讲机,通知道口值班员,道口值班员走到道口,经过遥控器进行声光报警;然后等待15~20秒后,经过外置的道口电控箱开始落下道杆;
●火车尾(或头)一过道口离开段,马上抬杆放行。
延时2秒左右,取消声光报警。
1.4高炉
1#高炉比较特殊,向南没有铁轨,出铁水过程为:
火车向北运行,经道岔并到东边轨道,然后倒车向南运行到炼钢厂。
1#高炉附近的单轨在改造后,会变短,大概10米左右(现30米左右)。
2#高炉、3#高炉和4#高炉内部的轨道均为双向轨道,火车都能够双向运行。
一般情况下,当1#高炉(450m3)、2#高炉(580m3)、3#高炉(450m3)都正常运行时,需要2辆火车在轨道运行。
当4#高炉(1080m3)正常生产时,需要3~4辆火车在铁道上运行。
1.5铁道和火车相关
1.5.1基本铁道参数
铁轨参数:
50铁轨,50kg/m,长12.5m。
火车轮间距:
1435mm。
火车车头单侧2个车轮,铁水包单侧4个车轮。
1.5.2火车运行情况
火车运行速度:
5~6Km/h,空载车(以下简称”空车”)速度稍高,装载铁水的火车(以下简称”实车”)速度较低,一般要求不超过5Km/h。
一般情况下,火车会拉3~4节左右的铁水罐(每节铁水罐长度为7.5米,车头基本也7.5米)。
火车拉的铁水罐数量因铁道的不同而不同,其中,东边的铁道(该轨道在炼钢厂的尽头有坑道,比西边的短10多米),最多允许拉4节铁水罐;西边的铁道,最多允许拉7节铁水罐。
一般情况下,1个车头用1个铁道:
空车拉,实车倒,车头始终朝北。
其中,当实车到达炼钢厂后,到达合适位置。
处于安全考虑,火车头卸下铁水罐,开出来后在外面,等待铁水罐清空,再挂上空铁水罐。
有时,空载火车头会到别的高炉,拉新的铁水罐。
正常情况下,如果需要换车头,都会将火车停在1#道口附近的道岔上,即3条轨道变2条轨道附近。
火车走在铁路上,偶然调头回去,发生这种情况的原因为:
轨道衡没有出现合适的重量,需要火车倒回去重新经过一遍轨道衡,因此,不可能出现火车倒回到出发位置(如某个高炉或炼钢厂)的情况。
1.6其它
1.6.1道口清扫
当机动车经过道口时,遗撒一些货物和原料。
道口值班员随时发现,随时清扫。
1.6.2铁水包维修
铁水包在使用的过程中,需要及时维修。
维修铁水包的火车行车路线为:
从炼钢厂出来回1#道口附近的道岔口,再换道岔后再到铁水包修理厂。
1.6.3火车头维修
火车头维修路线厂方未定,估计2月下旬能确定此事。
初步设想是:
将维修点设在1#道口的值班室附近最西边的轨道上。
1.6.4轨道衡
轨道衡安装在1#道口附近,属于动态衡,轨道衡不影响火车从道口经过:
当火车经过轨道衡到道口时,正常声光报警和落杆。
只有轨道衡测重不正常时,才需要将火车倒回去,重新称重。
2铁路道口远程控制系统特点
铁路道口远程控制系统利用视频监控、自动控制和计算机网络三种技术的有机结合,经过将有人值守道口改进为”远程控制道口”,并在后台的控制中心,经过实时视频图像和控制技术,实现对散布在厂区的各个道口进行控制。
铁路道口远程控制系统,具有以下主要特点:
⏹安全性高:
全景图像实时、清晰、无死角,实时,保证道口有较高的安全性。
⏹扩容性高:
系统具有较好的模块化结构,当需要增加道口数量时,能够简单修改和设置,就可满足更多道口的设立要求,提高经济性,也节省了成本。
⏹视频录像提高道口相关人的安全意识:
视频录像技术有助于提高行人及机动车驾驶员的安全意识,辅助事故处理。
而且,经过完善的技术防范和警示设备,来减少安全隐患发生的几率。
⏹节约人力成本,提高生产效率:
将道口改为远程控制后,减少有人值守时值班人员责任心不同带来的差异,提高生产效率,同时也节省人工。
⏹改进企业环境:
道口警示明确,自动化程度较高,进一步优化了企业内部环境。
3铁路道口远程控制系统结构
3.1系统配置
铁路道口远程控制硬件系统,其示意图如图4所示。
整个系统的远程集中控制室设在1#道口值班室。
●1#道口和4#道口配备完整的道口设备,包括:
铁轨传感器、红外对射器、声光报警器、信号灯和道闸、功放和音箱、摄像头;
●2#、3#、5#小道口,只配备铁轨传感器和声光报警器。
道口设备与控制室计算机系统之间详细的连接关系,如图3所示。
图3单个铁路道口远程控制硬件系统图
3.2网络拓扑
图4铁路道口远程控制硬件系统的网络拓扑图
其中:
⏹控制台计算机:
经过开发控制软件。
⏹大尺寸液晶显示器:
能够为27吋以上的液晶显示器,经过VGA接口连接到视频服务器(即硬盘录像机)上。
⏹视频服务器经过多个BNC输入接口,来连接多个视频光端机的模拟视频信号。
视频服务器监控软件实现控制录像的录制,以及在本机显示器或大尺寸液晶显示器上回放
⏹拾音器输出接到视频光端机的音频输入接口上,实现后台中控室向道口现场发送紧急广播。
视频光端机的音频输出到功放上,将音频放大后再到喇叭输出。
⏹铁轨磁感式传感器和红外对射器将火车接近/离开的信息输入到道口控制器上,同时进行逻辑判断后,并行判断决定声光报警器和道闸的动作情况。
3.3系统组成及功能
铁路道口远程控制硬件系统,包括三部分:
道口设备系统、光纤通信系统、集中远控系统。
3.3.1道口设备系统
道口设备系统包括:
铁轨磁感式传感器、道闸、道口信号灯、声光报警灯、摄像头等设备,以及道口控制器。
⏹铁轨磁感式传感器:
检测火车到达道口和离开道口附近的信号,其信号输出至道口控制器。
⏹红外对射开关:
⏹道口控制器:
根据火车到达道口和离开道口信号,控制道闸、道口信号灯、报警灯和蜂鸣器等道口设备的动作;与后台的控制台控制信息;对音频信号的输出进行适当的功率放大。
⏹道闸:
阻止/允许行人和车辆的通行。
⏹道口信号灯:
分为红、黄、绿三色,功能同一般路口的交通信号灯。
⏹声光报警灯:
发出声光,进行报警。
⏹摄像头:
拍摄道口的火车接近/离开情况。
3.3.2光纤通信系统
光纤通信系统主要为光纤、视频光端机、光电转换器等。
⏹视频光端机:
视频信号和音频信号的光电转换。
⏹光电转换器:
控制信号的光电转换。
3.3.3集中远控系统
包括视频服务器、数据库服务器、控制台、大尺寸液晶显示器(选用)和集线器等。
⏹视频服务器主要为硬盘录像机,将每次录制的视频按照一定的规律进行存放;并输出视频信号到控制台上实时显示。
⏹数据库服务器主要记录火车每次到来和离开的时间、值班人等信息;为每次操作建立日志;为以后扩展预留数据接口(如火车运送的铁水信息、火车司机个人信息等)。
⏹控制台主要是监控道口传输过来的视频录像,并根据情况进行操作。
⏹大尺寸液晶显示器,将道口传输过来的视频录像放大,方便后台调度指挥系统操作员离开控制台,在较远的距离来查看道口情况。
3.4道口设备安装
3.4.1主要道口实施单轨道8个传感器安装方案
●单轨道8个传感器安装方案用于1#大道口和4#大道口。
单轨道8个传感器安装方案指单条轨道按行驶方向分为上行路线和下行路线。
上行路线在本方向上火车接近点放置2个传感器,离开点放置2个传感器;下行路线的放置方法相同。
一般情况下,接近点的传感器离道口约40~50米,离开点距离道口几米左右,具体位置视道口附近的建筑物相对距离而定。
●为保证可靠,在1#和4#大道口,也布设红外对射器,与轨道传感器同时确定火车位置。
1)1#大道口较宽,布设4对红外对射器;
2)4#大道口布设2对红外对射器。
●判断逻辑简述
利用2个传感器的输出信息,来判断火车运行的方向,然后再确定是接近点还是离开点。
接近点启动报警(启动报警包括启动报警器,以及延时后道闸落杆),离开点解除报警(解除报警包括道闸起杆,以及延时后关掉报警器)。
如遇两辆火车在道口附近对开,则用最先达到接近点的火车时刻启动报警,而以最后离开的离开点的火车时刻解除报警。
3.4.2小道口实施单轨道3个传感器安装方案
●单轨道3个传感器安装方案用于2#、4#和5#小道口。
单轨道3个传感器安装方案指单条轨道在两个行驶方向的接近点各放置1个传感器,道口边放置1个作为离开点,属于相对简化的布局方案。
●判断逻辑简介
到火车到达接近点(不论是离开道口,还是接近道口)启动报警。
若在一定延时时间内收到离开点的传感器信号,则解除报警,火车到达另一接近点时,则复位整个判断过程。
3.4.3道口控制器安装
道口控制器均安装在每个道口值班室或现场竖杆操作箱内。
3.4.4摄像头和音频设备安装
摄像头以及工业音箱安装在1#大道口和4#大道口。
音频设备功放安装在1#大道口和4#大道口的值班室内。
Ø1#大道口,道口较宽,铺设3条铁道,需安装5个摄像头:
⏹向南向北两个方向各安装2个。
向北的2个摄像头,安装在值班室附近的管道支架上,监视北边的2条铁道;向南的2个摄像头,安装在道口两侧的北端,监视北边的2条铁道和道口。
⏹在道口一侧,
 升级会员
升级会员 