第十四章隧道测量Word下载.docx
《第十四章隧道测量Word下载.docx》由会员分享,可在线阅读,更多相关《第十四章隧道测量Word下载.docx(21页珍藏版)》请在冰豆网上搜索。
中线法、精密导线法、三角测量、三边测量、边角测量或综合使用,此外还可以采用GPS测量。
一、中线法
所谓中线法,就是将隧道线路中线的平面位置,按定测的方法先测设在地表
上,经反复核对无误后,才能把地表控制点确定下来,施工时就以这些控制点为准,将中线引入洞内。
一般在直线隧道短于1000m,曲线隧道短于500m时,可以采用中线作为控制。
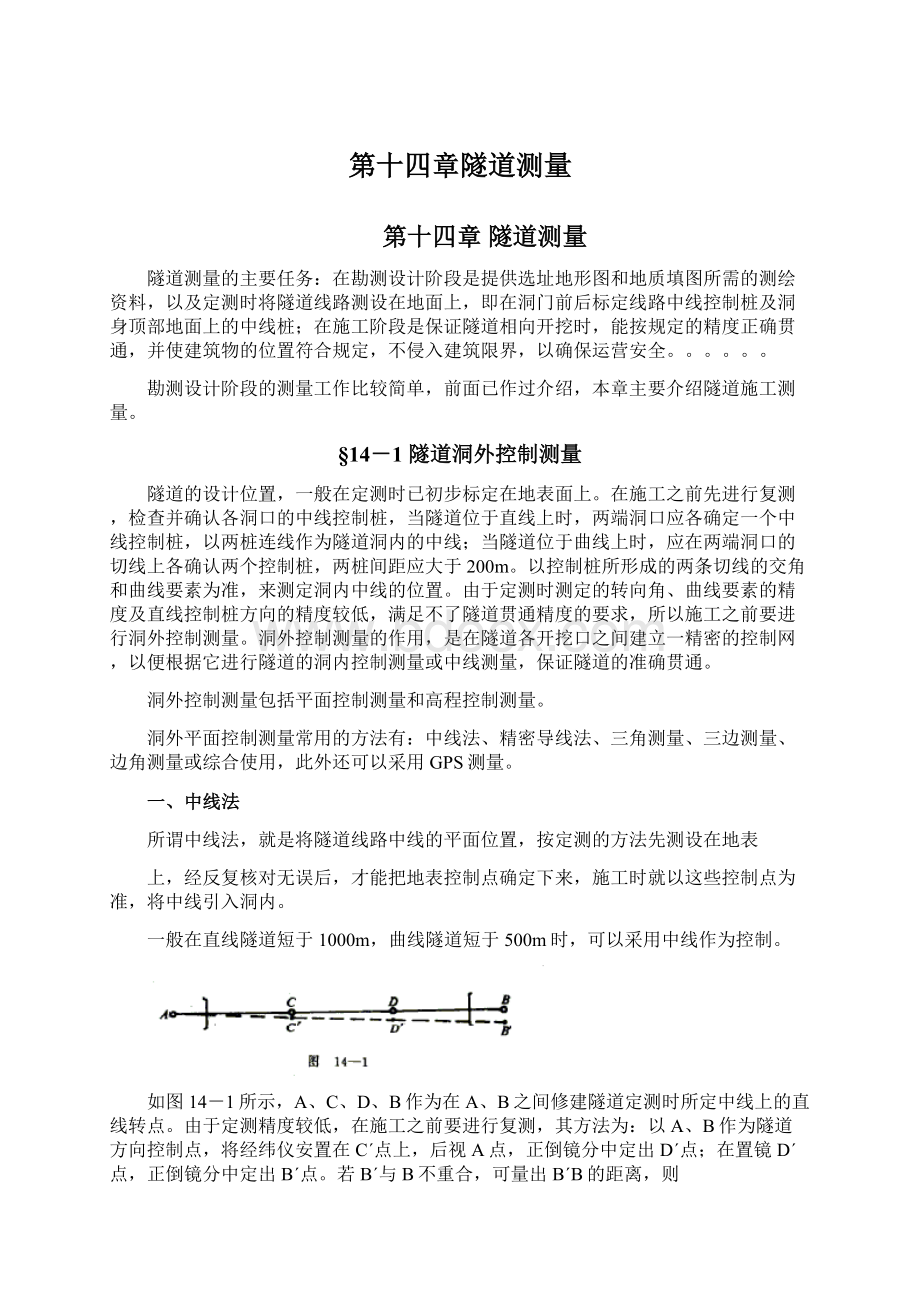
如图14-1所示,A、C、D、B作为在A、B之间修建隧道定测时所定中线上的直线转点。
由于定测精度较低,在施工之前要进行复测,其方法为:
以A、B作为隧道方向控制点,将经纬仪安置在C´
点上,后视A点,正倒镜分中定出D´
点;
在置镜D´
点,正倒镜分中定出B´
点。
若B´
与B不重合,可量出B´
B的距离,则
自D´
点沿垂直于线路中线方向量出D´
D定出D点,同法也可定出C点。
然后再将经纬仪分别安在C、D点上复核,证明该两点位于直线AB的连线上时,即可将它们固定下来,作为中线进洞的方向。
若用于曲线隧道,则应首先精确标出两切线方向,然后精确测出转向角,将切线长度正确地标定在地表上,以切线上的控制点为准,将中线引入洞内。
中线法简单、直观,但其精度不太高。
二、精密导线法
导线法比较灵活、方便,对地形的适应性比较大。
目前在光电测距仪已经普
及和其精度不断提高的情况下,有条件的单位,导线法应当是隧道洞外控制形式的首选方案。
精密导线应组成多边形闭合环。
它可以是独立闭合导线,也可以与国家三角点相连。
导线水平角的观测,应以总测回数的奇数测回和偶数测回,分别观测导线前进方向的左角和右角,以检查测角错误;
将它们换算为左角或右角后再取平均值,可以提高测角精度。
为了增加检核条件和提高测角精度评定的可行性,导线环的个数不宜太少,最少不应少于4个;
每个环的边数不宜太多,一般以4~6条边为宜。
在进行导线边长丈量时,应尽量接近于测距仪的最佳测程,且边长不应短于300m;
导线尽量以直伸形式布设,减少转折角的个数,以减弱边长误差和测角误差对隧道横向贯通误差的影响。
我国大瑶山隧道长14.3km,洞外控制采用导线网,取得了很好的效果。
导线的测角中误差按下式计算,并应满足测量设计的精度要求。
(14-1)
式中——导线环的角度闭合差(″);
——一个导线环内角的个数;
N——导线环的个数。
导线环(网)的平差计算,一般采用条件平差或间接平差。
边与角按下式定权
(14-2)
式中——导线测角中误差,按式(14-1)计算,并宜用统计值;
——导线边长中误差,宜用统计值。
当导线精度要求不高时,亦可采用近似平差。
三、三角测量
三角测量的方向控制较中线法、导线法都高,如果仅从横向贯通精度的观点
考虑,则它是最理想的隧道平面控制方法。
三角测量除采用测角三角锁外,还可采用变角网和三边网。
但从精度、工作量、经济方面综合考虑,以测角三角锁为好。
三角锁一般布置一条高精度的基线作为起始边,并在三角锁另一端增设一条基线,以资检核;
其余仅只有测角工作,按正弦定理推算边长,经过平差计算可求得三角点和隧道轴线上控制点的坐标,然后以控制点为依据,确定进洞方向。
四、三角锁和导线联合控制
这种方法只有在受到特殊地形条件限制时才考虑,一般不宜采用。
如隧道在
城市附近,三角锁的中部遇到较密集的建筑群,这时使用导线穿过建筑群与两端的三角锁相连结。
用于隧道施工控制测量的三角锁或导线环,在布设中除了前面所述要求之外,还应注意以下几点:
1.使三角锁或导线环的方向,尽量垂直于贯通面,以减弱边长误差对横向贯通精度的影响。
2.尽量选择长边,减少三角形个数或导线边个数,以减弱测角误差对横向贯通精度的影响。
3.每一洞口附近测设不少于三个平面控制点(包括洞口投点及其相联系的三角点或导线点),作为引线入洞的依据,并尽量将其纳入主网中,以加强点位稳定性和入洞方向的校核。
4.三角锁的起始边如果只有一条,则应尽量布设于三角锁中部;
如果有两条,则应使其位于三角锁两端,这样不仅利于洞口插网,而且可以减弱三角网测量误差对横向贯通精度的影响。
5.三角锁中若要增列基线条件时,应将基线设于锁段两端,但此时起始边的测量精度应满足下列要求:
(14-3)
否则,不应加入基线条件。
五、GPS测量
GPS是全球定位系统的简称,它的原理和使用,可参看第十六章GPS测量。
隧道施工控制网可利用GPS相对定位技术,采用静态或快速静态测量方式
进行测量。
由于定位时仅需要在开挖洞口附近测定几个控制点,工作量少,而且可以全天候观测,目前已得到应用。
隧道GPS定位网的布网设计,应满足下列要求:
1.定位网由隧道各开挖口的控制点点群组成,每个开挖口至少应布测4个控制点。
整个控制网应由一个或若干个独立观测环组成,每个独立观测环的边数最多不超过12个,应尽可能减少。
2.网的边长最长不宜超过30km,最短不宜短于300m。
3.每个控制点应有三个或三个以上的边与其连接,极个别的点才允许由两个边连接。
4.GPS定位点之间一般不要求同视,但布设洞口控制点时,考虑到用常规测量方法检测、加密或恢复的需要,应当同视。
5.点位空中视野开阔,保证至少能接收到4颗卫星信号。
6.测站附近不应有对电磁波有强烈吸收和反射影响的金属和其它物体。
六、高程控制测量
洞外高程控制测量的任务,是按照设计精度施测两相向开挖洞口附近水准点
之间的高差,以便将整个隧道的统一高程系统引入洞内,保证按规定精度在高程方面正确贯通,并使隧道工程在高程方面按要求的精度正确修建。
高程控制的二、三等采用水准测量。
四、五等可采用水准测量,当山势陡峻采用水准测量困难时,亦可采用光电测距仪三角高程的方法测定各洞口高程。
每一个洞口应埋设不少于2个水准点,两水准点之间的高差,以安置一次水准仪即可测出为宜。
水准测量的精度,一般参照表14-1即可。
表14-1等级水准测量的路线长度和仪器精度
测量部位
测量等级
每公里高差中数的偶然中误差(mm)
两开挖洞口间的水准路线长度(km)
水准仪等级
水准尺类型
洞外
二
≤1.0
>36
S0.5、S1
线条式因瓦水准尺
三
≤3.0
13~36
S1
S3
区格式水准尺
四
≤5.0
5~13
洞内
>32
11~32
5~11
由上述各种方法比较看出,中线法控制形式最简单,但由于方向控制较差,故只能用于较短的隧道;
三角测量方法其方向控制精度最高,故在光电测距仪未广泛使用之前,是隧道控制最主要的形式,但其三角点的布设要受到地形、地物条件的限制,而且基线边要求精度高,使丈量工作复杂,平差计算工作量大;
精密导线法,在光电测距仪的测程和精度不断提高的今天,由于布设简单、灵活、地形适应性强、外业工作量少,因而逐渐成为隧道控制的主要形式,只要在水平角测量时适当增加测回数,就可弥补其方向控制不如三角测量之不足。
而且光电测距导线和光电测距三角高程可以同时进行,大大减少了野外工作量,是今后隧道控制中应首选的方案;
GPS测量是目前正处于试验阶段的一种全新控制形式,随着其价格的降低、精度的提高、理论的完善,势必成为将来最有前途的控制形式。
14-2隧道洞外、洞内联系测量
一、进洞关系的计算和进洞测量
洞外控制测量完成以后,应把各洞口的线路中线控制桩和洞外控制网联系起来。
由于控制网和线路中线两者的坐标系不一致,应首先把洞外控制点和中线控制桩的坐标纳入同一坐标系统内,故必须先进行坐标变换计算,得到控制点在变换后的新坐标。
其坐标变换计算公式可以采用解析几何中的坐标转轴和移轴计算公式。
一般在直线段以线路中线作为x轴;
曲线上则以一条切线方向作为x轴。
用线路中线点和控制点的坐标,反算两点的距离和方位角,从而确定进洞测量的数据。
把中线引入洞内,可按下列方法进行:
(一)直线隧道
1.移桩法
如图14-2所示,空口两端线路控制点A、B、C、D是按定测精度测设的,
它们并不是严格位于同一条直线上。
经精测A、B、C、D后,可以A为原点,AB方向为纵轴,计算出C、D两点相应的偏离值yc、yd和β角,将经纬仪分别安置在C和D上,拔角量出垂线yc和yd,即可移桩定出C‘和D‘点,再将经纬仪安置于D‘点,照准C’即得进洞方向。
当偏移量较大时,为保持原设计的线路平面位置和方向的一致性,可用洞口两端的A、D两点连线作纵轴,将B、C移至中线上。
2.拔角法
如图14-3,当以AD为坐标纵轴时,可根据A、B及C、D点的坐标,反算出水平角α和β,即可得到进洞方向。
通常为了施工测量方便,亦可将B、C两点移到中线上的B‘、C’点上。
(二)曲线隧道
曲线隧道两端洞口的每条切线上已有两个投点的坐标在控制网中得到,如图
14-4中的A、G和D、E。
经坐标变换后,以A点为坐标系原点,AG的切线方向为y轴,其进洞关系的计算步骤如下:
1.坐标变换后,得到A、G、D、E各点的新坐标。
根据这些新坐标反算得到AG、DE的方位角;
两方位角相减得到曲线精测的转向角α,它的精度较之定测角值精确,并与各点的坐标相一致。
2.计算交点的坐标
因为AG切线与
y轴重合或平行,故JD的x坐标为零或选定值,它是已知的;
只需计算出JD的y坐标值即可。
(14-4)
3.根据精测算得的α和选定的曲线半径R和缓和曲线长,计算出曲线要素T、L、、、、、。
4.选定洞口外面一个中线控制桩的里程,使其和定测里程一致,例如选定A点。
由此从A推算隧道范围内其它中线控制点的里程,到隧道另一端洞口外的中线控制点上出现断链,这是由于精测长度和定测长度不一致所致,这种里程称为隧道施工里程。
5.计算任一中线点的坐标
要想在洞中测设出任一中线点的位置,必须先知道该点的施工里程,使它与曲线控制桩的施工里程相比较,才能确定该点是在直线上,还是在曲线上,并且知道该点距中线控制桩有多远。
由于任一中线点的位置不同,所以计算坐标的方法也不同,现分别说明如下:
(1)中线点在直线上
如图14-4所示,进口洞门在一直线上,而N1点在出口端的另一直线上。
在已知各点的施工里程DK进口、DKN1(不能用定测里程)的情况下,则
x进口=0
y进口=DK进口-DKA
(14-5)
(2)中线点在缓和曲线上
首先计算出它们的切线坐标(计算到mm或0.1mm),然后将切线坐标转换为统一坐标。
例如
 升级会员
升级会员 