机器人第三章作业.wps资料文档下载
《机器人第三章作业.wps资料文档下载》由会员分享,可在线阅读,更多相关《机器人第三章作业.wps资料文档下载(15页珍藏版)》请在冰豆网上搜索。
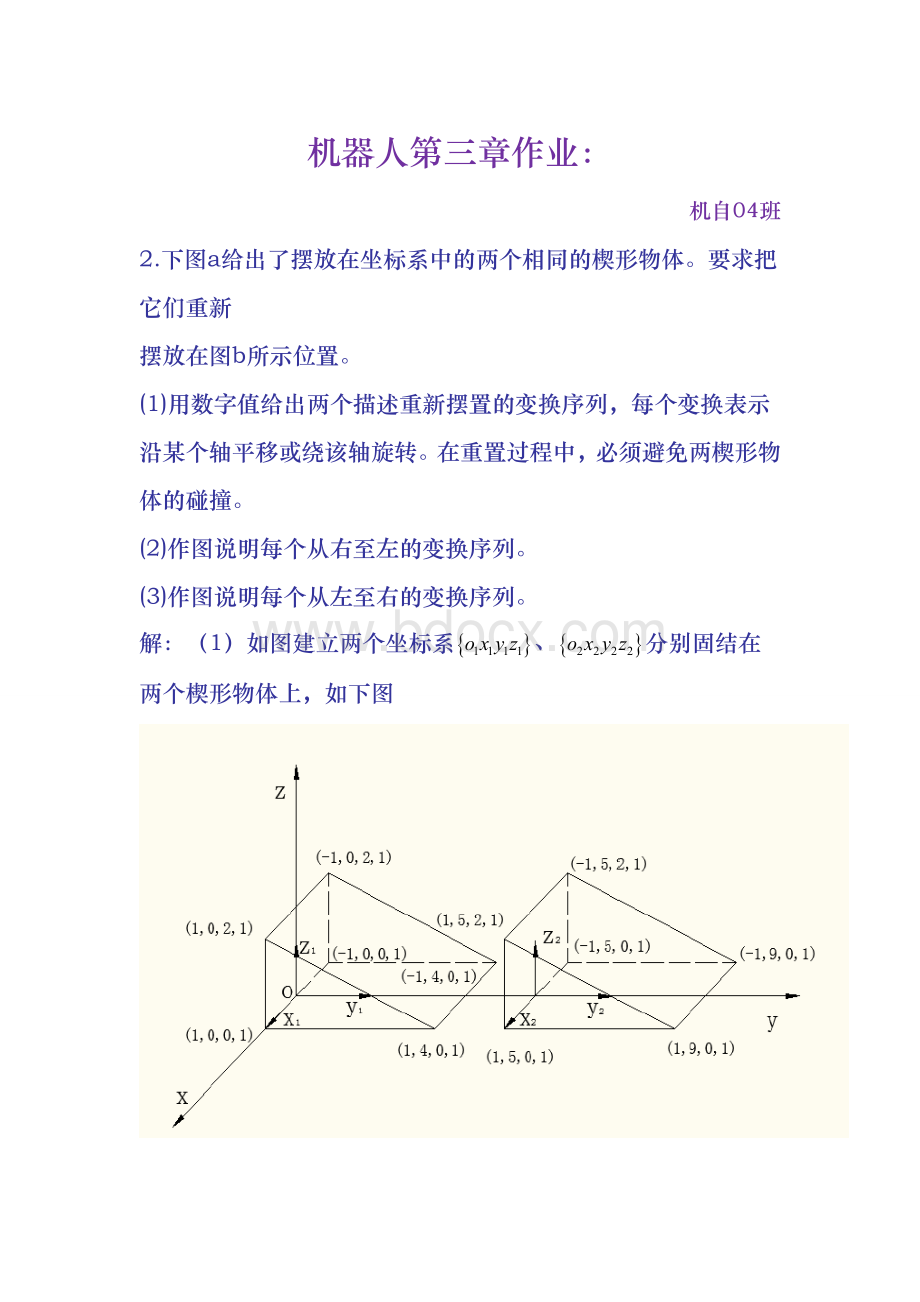
(3)作图说明每个从左至右的变换序列。
解:
(1)如图建立两个坐标系1111oxyz、2222oxyz分别固结在两个楔形物体上,如下图对楔块1进行的变换矩阵为:
1(,90)(,90)RotyRotzT;
对楔块2进行的变换矩阵为:
2(3,0,4)(,90)(0,5,0)(,90)(,180)TransRotzTransRotxRotzT由matlab可以求出10010100001000001T;
200-1210000-1040001T
(2)T1从左到右的变换序列图示T1从右到左的变换序列图示T2从左到右的变换序列图示T2从右到左的变换序列图示3.求出类型2和类型3欧拉角表达的正逆运动学方程的解。
类型2欧拉角表达的正运动学方程的解已知欧拉变换(,)(,)(,)(,)EulerRotzRotyRotz进一步计算有:
00000000010000(,)00100000100001000100010000001cscscsscscEulersccccssccssccsscccsscsccssscssc则由6(,)0001xxxxyyyyzzzznoapnoapTEulernoap得0xyzxyzxyzxyzncccssnscccsnscoccsscoscsccossacsassacppp类型3欧拉角表达的正运动学方程的解已知欧拉变换(,)(,)(,)(,)RPYRotzRotyRotx进一步计算有:
0000100000010000(,)001000000001000100010000001cscssccsRPYscsccccsssccscssscsssccssccsscscc则由6(,)0001xxxxyyyyzzzznoapnoapTRPYnoap得0xyzxyzxyzxyzncccssnscccsnscoccsscoscsccossacsassacppp类型2欧拉角表达的逆运动学方程的解已知任一变换T,求,和。
由欧拉变换有:
1(,)(,)(,)RotzTRotyRotz展开有:
式31000000000100000000010001xxxxyyyyzzzzcsnoapcccssscnoapscnoapscssc则令方程式的两边对应元素相等,可得:
0xysaca这样,就可以从反正切函数atan2得到:
tan2(,)yxaaa和tan2(,)yxaaa两解相差180。
求得值之后,式31左式的所有元素也就随之确定。
另左式元素与右边对应相等可得:
xyzscasaca于是有:
tan2(,)xyxacasaa最后求解角度。
由式31有:
xyxyssncncsoco从而得到:
tan2(,)xyxyasncnsoco概括的说,如果已知一个表示任意旋转的齐次变换,那么就能够确定其等价欧拉角:
tan2(,),180tan2(,)tan2(,)yxxyxxyxyaaaacasaaasncnsoco类型3欧拉角表达的逆运动学方程的解已知任一变换T,求,和。
1(,)(,)(,)RotzTRotyRotx展开有:
000000000100000000010001xxxxyyyyzzzzcsnoapcssscscnoapcsnoapscscc则令方程式的两边对应元素相等,可得:
0xysncn这样,就可以从反正切函数atan2得到:
tan2(,)180yxann两解相差180。
再令式32中对应元素相等,有:
zxysnccnsn式32于是得:
tan2(,)zxyancnsn还可以由:
xyxyssacacsoco据此可得:
tan2(,)xyxyasacasoco综上分析可得RPY变换各角如下:
tan2(,)180tan2(,)tan2(,)yxzxyxyxyannancnsnasacasoco4.求PUMA560机器人的逆运动学方程的解。
建立PUMA560机器人的D-H坐标系如图如下:
求各连杆变换矩阵如下:
111101000000100001csscT222122200001000001csdTsc332332300000100001csascT443434440001000001csadTsc554555000010000001csTsc665666000010000001csTsc求PUMA560机器人的逆运动学方程的解,则末端执行器的位姿已知,即060001xxxxyyyyzzzznoapnoapTnoap其中,noap为已知量;
且有00123456112233445566()()()()()()0001xxxxyyyyzzzznoapnoapTTTTTTTnoap则求关节变量1,2,3,4,5,6的值。
具体求解步骤如下:
1.求1用逆变换0111T左乘(式1)两边:
001123451162233445566111611()()()()()0000001000010001xxxxyyyyzzzzTTTTTTTcsnoapnoapTscnoap令矩阵方程两端的元素(2,4)对应相等,可得:
112xyspcpd利用三角代换:
cosxpsinyp式中,22xypp;
tan2(,)yxapp。
带入可以得出1的解:
(式(式1)式式212sin()/;
d212cos()1/d2221tan2,1dda222122tan2(,)tan2(,)yxxyappadppd式中,正、负号对应于1的两个可能解。
2.求3在选定1的一个解之后,再令矩阵方程两端的元素(1,4)和(3,4)分别对应相等,即得两方程:
113234232232342322xyxcpspacdsacpasdcas结合式2与上式,消去2,可以求解得3为:
22233434tan2(,)tan2(,)aadakadk式中正、负号对应3的两种可能解。
其中,2222222232422xyzpppaaddka3.求2为求解求2,在矩阵方程(式1)两边左乘逆变换013T:
00134531236445566,()()()TTTTT展开得1231232323123123232336112000010001xxxxyyyyzzzzccscsacnoapcssscasnoapTscdnoap令矩阵方程两边的元素(1,4)和(2,4)分别对应相等可得:
1231232323312312323234xyzxyyccpscpspacacspsspcpasd联立求解得23s和23c:
323112342211423112332211()()()()()()()()zxyzzxyzaacpcpspasdspcpspdaspcpspacacpcpsp由上式得23233231123442311233tan2()()(),()()()zxyzxyaaacpcpspasddaspcpspaca根据1和3解的四种可能组合,由上式可以得到相应的四种可能值23,于是可得到2的四种可能解:
2233式中,2取与3相对应的值。
4.求4因为式4-3的左边均为已知,令两边元素(1,3)和(3,3)分别对应相等,则可得:
式式312312323451145xyzxyaccascascsasacss只要s50,便可求出4:
41112312323tan2(,)xyxyzaasacaccascas5.求5据求出的4,可进一步解出5,将式1两端左乘逆变换0141234,T得:
010454123465566(,)()()TTTT逆变换0141234,T为:
1234141234142342342434123414123414234234243414123412312323234(,)0001cccssscccsscaccdsacccsscscsccssacsdcasTcssscasd根据矩阵两边元素分别对应相等,可得:
1234141234142345123123235()()()()()()xyzxyzacccssascccsascsacsassacc由此得到5的解:
555tan2(,)asc6.求6将式1改写为:
01055125666(,)()TTT令上面矩阵方程两边元素分别对应相等可得:
1234141234142346123414512351234145123523452356()()()()()()xyzxyznccsscnscsccnsssncccssccssnscccscsssnscccsc从而可求出6的解:
666tan2(,)asc以上求解过程即是PUMA560机器人的逆运动学方程求解过程。
 升级会员
升级会员 