TheFundamentalsOfDigitalSemiconductorTesting_中文版CWord格式文档下载.doc
《TheFundamentalsOfDigitalSemiconductorTesting_中文版CWord格式文档下载.doc》由会员分享,可在线阅读,更多相关《TheFundamentalsOfDigitalSemiconductorTesting_中文版CWord格式文档下载.doc(81页珍藏版)》请在冰豆网上搜索。
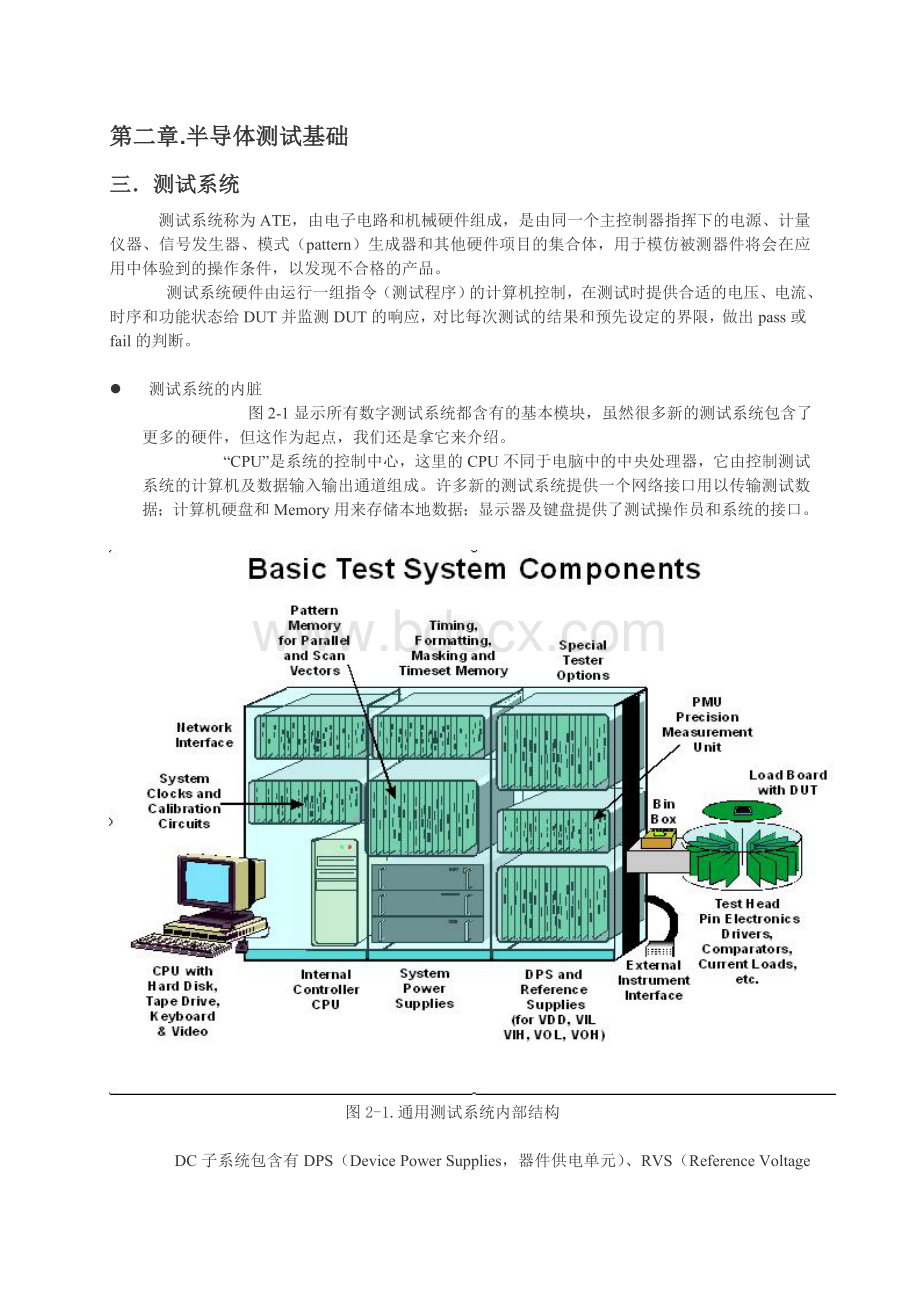
许多新的测试系统提供一个网络接口用以传输测试数据;
计算机硬盘和Memory用来存储本地数据;
显示器及键盘提供了测试操作员和系统的接口。
图2-1.通用测试系统内部结构
DC子系统包含有DPS(DevicePowerSupplies,器件供电单元)、RVS(ReferenceVoltageSupplies,参考电压源)、PMU(PrecisionMeasurementUnit,精密测量单元)。
DPS为被测器件的电源管脚提供电压和电流;
RVS为系统内部管脚测试单元的驱动和比较电路提供逻辑0和逻辑1电平提供参考电压,这些电压设置包括:
VIL、VIH、VOL和VOH。
性能稍逊的或者老一点的测试系统只有有限的RVS,因而同一时间测试程序只能提供少量的输入和输出电平。
这里先提及一个概念,“testerpin”,也叫做“testerchannel”,它是一种探针,和Loadboard背面的Pad接触为被测器件的管脚提供信号。
当测试机的pins共享某一资源,比如RVS,则此资源称为“SharedResource”。
一些测试系统称拥有“perpin”的结构,就是说它们可以为每一个pin独立地设置输入及输出信号的电平和时序。
DC子系统还包含PMU(精密测量单元,PrecisionMeasurementUnit)电路以进行精确的DC参数测试,一些系统的PMU也是perpin结构,安装在测试头(TestHead)中。
(PMU我们将在后面进行单独的讲解)
每个测试系统都有高速的存储器——称为“patternmemory”或“vectormemory”——去存储测试向量(vector或pattern)。
Testpattern(注:
本人驽钝,一直不知道这个pattern的准确翻译,很多译者将其直译为“模式”,我认为有点欠妥,实际上它就是一个二维的真值表;
将“testpattern”翻译成“测试向量”吧,那“vector”又如何区别?
呵呵,还想听听大家意见)描绘了器件设计所期望的一系列逻辑功能的输入输出的状态,测试系统从patternmemory中读取输入信号或者叫驱动信号(Drive)的pattern状态,通过testerpin输送给待测器件的相应管脚;
再从器件输出管脚读取相应信号的状态,与pattern中相应的输出信号或者叫期望(Expect)信号进行比较。
进行功能测试时,pattern为待测器件提供激励并监测器件的输出,如果器件输入与期望不相符,则一个功能失效产生了。
有两种类型的测试向量——并行向量和扫描向量,大多数测试系统都支持以上两种向量。
Timing分区存储有功能测试需要用到的格式、掩盖(mask)和时序设置等数据和信息,信号格式(波形)和时间沿标识定义了输入信号的格式和对输出信号进行采样的时间点。
Timing分区从patternmemory那里接收激励状态(“0”或者“1”),结合时序及信号格式等信息,生成格式化的数据送给电路的驱动部分,进而输送给待测器件。
SpecialTesterOptions部分包含一些可配置的特殊功能,如向量生成器、存储器测试,或者模拟电路测试所需要的特殊的硬件结构。
TheSystenClocks为测试系统提供同步的时钟信号,这些信号通常运行在比功能测试要高得多的频率范围;
这部分还包括许多测试系统都包含的时钟校验电路。
其他的小模块这里不再赘述,大家基本上可以望文生义,呵呵。
四.PMU
PMU(PrecisionMeasurementUnit,精密测量单元)用于精确的DC参数测量,它能驱动电流进入器件而去量测电压或者为器件加上电压而去量测产生的电流。
PMU的数量跟测试机的等级有关,低端的测试机往往只有一个PMU,同过共享的方式被测试通道(testchannel)逐次使用;
中端的则有一组PMU,通常为8个或16个,而一组通道往往也是8个或16个,这样可以整组逐次使用;
而高端的测试机则会采用perpin的结构,每个channel配置一个PMU。
图2-2.PMU状态模拟图
驱动模式和测量模式(ForceandMeasurementModes)
在ATE中,术语“驱动(Force)”描述了测试机应用于被测器件的一定数值的电流或电压,它的替代词是Apply,在半导体测试专业术语中,Apply和Force都表述同样的意思。
在对PMU进行编程时,驱动功能可选择为电压或电流:
如果选择了电流,则测量模式自动被设置成电压;
反之,如果选择了电压,则测量模式自动被设置成电流。
一旦选择了驱动功能,则相应的数值必须同时被设置。
驱动线路和感知线路(ForceandSenseLines)
为了提升PMU驱动电压的精确度,常使用4条线路的结构:
两条驱动线路传输电流,另两条感知线路监测我们感兴趣的点(通常是DUT)的电压。
这缘于欧姆定律,大家知道,任何线路都有电阻,当电流流经线路会在其两端产生压降,这样我们给到DUT端的电压往往小于我们在程序中设置的参数。
设置两根独立的(不输送电流)感知线路去检测DUT端的电压,反馈给电压源,电压源再将其与理想值进行比较,并作相应的补偿和修正,以消除电流流经线路产生的偏差。
驱动线路和感知线路的连接点被称作“开尔文连接点”。
量程设置(RangeSettings)
PMU的驱动和测量范围在编程时必须被选定,合适的量程设定将保证测试结果的准确性。
需要提醒的是,PMU的驱动和测量本身就有就有范围的限制,驱动的范围取决于PMU的最大驱动能力,如果程序中设定PMU输出5V的电压而PMU本身设定为输出4V电压的话,最终只能输出4V的电压。
同理,如果电流测量的量程被设定为1mA,则无论实际电路中电流多大,能测到的读数不会超过1mA。
值得注意的是,PMU上无论是驱动的范围还是测量的量程,在连接到DUT的时候都不应该再发生变化。
这种范围或量程的变化会引起噪声脉冲(浪涌),是一种信号电压值短时间内的急剧变化产生的瞬间高压,类似于ESD的放电,会对DUT造成损害。
边界设置(LimitSettings)
PMU有上限和下限这两个可编程的测量边界,它们可以单独使用(如某个参数只需要小于或大于某个值)或者一起使用。
实际测量值大于上限或小于下限的器件,均会被系统判为不良品。
钳制设置(ClampSettings)
大多数PMU会被测试程序设置钳制电压和电流,钳制装置是在测试期间控制PMU输出电压与电流的上限以保护测试操作人员、测试硬件及被测器件的电路。
图2-2.电流钳制电路模拟图
当PMU用于输出电压时,测试期间必须设定最大输出电流钳制。
驱动电压时,PMU会给予足够的必须的电流用以支持相应的电压,对DUT的某个管脚,测试机的驱动单元会不断增加电流以驱动它达到程序中设定的电压值。
如果此管脚对地短路(或者对其他源短路),而我们没有设定电流钳制,则通过它的电流会一直加大,直到相关的电路如探针、ProbeCard、相邻DUT甚至测试仪的通道全部烧毁。
图2-3显示PMU驱动5.0V电压施加到250ohm负载的情况,在实际的测试中,DUT是阻抗性负载,从欧姆定律I=U/R我们知道,其上将会通过20mA的电流。
器件的规格书可能定义可接受的最大电流为25mA,这就意味着我们程序中此电流上限边界将会被设置为25mA,而钳制电流可以设置为30mA。
如果某一有缺陷的器件的阻抗性负载只有10ohm的话,在没有设定电流钳制的情况下,通过的电流将达到500mA,这么大的电流已经足以对测试系统、硬件接口及器件本身造成损害;
而如果电流钳制设定在30mA,则电流会被钳制电路限定在安全的范围内,不会超过30mA。
电流钳制边界(Clamp)必须大于测试边界(Limit)上限,这样当遇到缺陷器件才能出现fail;
否则程序中会提示“边界电流过大”,测试中也不会出现fail了。
图2-4.电压钳制电路模拟图
当PMU用于输出电流时,测试期间则相应地需要进行电压钳制。
电压钳制和电流钳制在原理上大同小异,这里就不再赘述了。
五、管脚电路
管脚电路(ThePinElectronics,也叫PinCard、PE、PEC或I/OCard)是测试系统资源部和待测期间之间的接口,它给待测器件提供输入信号并接收待测器件的输出信号。
每个测试系统都有自己独特的设计但是通常其PE电路都会包括:
提供输入信号的驱动电路
驱动转换及电流负载的输入输出切换开关电路
检验输出电平的电压比较电路
与PMU的连接电路(点)
可编程的电流负载
还可能包括:
用于高速电流测试的附加电路
Perpin的PMU结构
尽管有着不同的变种,但PE的基本架构还是一脉相承的,图2-5显示了数字测试系统的数字测试通道的典型PE卡的电路结构。
图2-5.典型的PinElectronics
1.
驱动单元(TheDriver)
驱动电路从测试系统的其他相应环节获取格式化的信号,称为FDATA,当FDATA通过驱动电路,从参考电压源(RVS)获取的VIL/VIH参考电平被施加到格式化的数据上。
如果FDATA命令驱动单元去驱动逻辑0,则驱动单元会驱动VIL参考电压;
VIL(VoltageInLow)指施加到DUT的input管脚仍能被DUT内部电路识别为逻辑0的最高保证电压。
如果FDATA命令驱动单元去驱动逻辑1,则驱动单元会驱动VIH参考电压;
VIH(VoltageInHigh)指施加到DUT的input管脚仍能被DUT内部电路识别为逻辑1的最低保证电压。
F1场效应管用于隔离驱动电路和待测
 升级会员
升级会员 