机器人学课程报告1文档格式.docx
《机器人学课程报告1文档格式.docx》由会员分享,可在线阅读,更多相关《机器人学课程报告1文档格式.docx(5页珍藏版)》请在冰豆网上搜索。
Pro/E软件;
ADAMS软件
Abstract:
BasedonRoboticscourselearning,mentorresearchdirection,therobotintroducedthecharacteristicsandresearchstatusathomeandabroad,thefewerdegreesoffreedomparallelrobotresearchpresentsituationhascarriedontheanalysis;
inthePro/EsoftwareestablishmentofDeltarobotphysicalmodel,throughtheMecyProseamlessinterfacesoftwareintoADAMSsoftwareofkinematicsanddynamicssimulationanalysis;
throughtheADAMS/Colltl1olmoduletoADAMSsoftwareDeltarobotphysicalmodelintoMatlab/Simulink,usingMatlabsoftwaretoestablishthefuzzycontrollerandthecontrolsystemmodel,andinaccordancewiththegiventargettracksontheDeltarobotfuzzycontrol,therealizationofADAMS/Matlabjointsimulation.
Keywords:
lessDOFparallelrobot;
fuzzycontrol;
Kinematics;
Pro/Esoftware;
ADAMSsoftwear
1并联机器人的发展
所谓并联机构,即多环多自由度的机构,驱动器分布在不同环路上的闭式多环机构。
并联机构迄今为止最早的记录是1895年数学家Cauchy研究的-种“用关节连接的八面体”。
1949年,英国人Gough设计了一种六自由度的轮胎测试机,这种机器从1954年开始得到使用。
1965年,Stewart设计了一种含有3个支链的6自由度运动平台,并发表了-篇名为"
APIatformwithSixDegreesofFreedom"
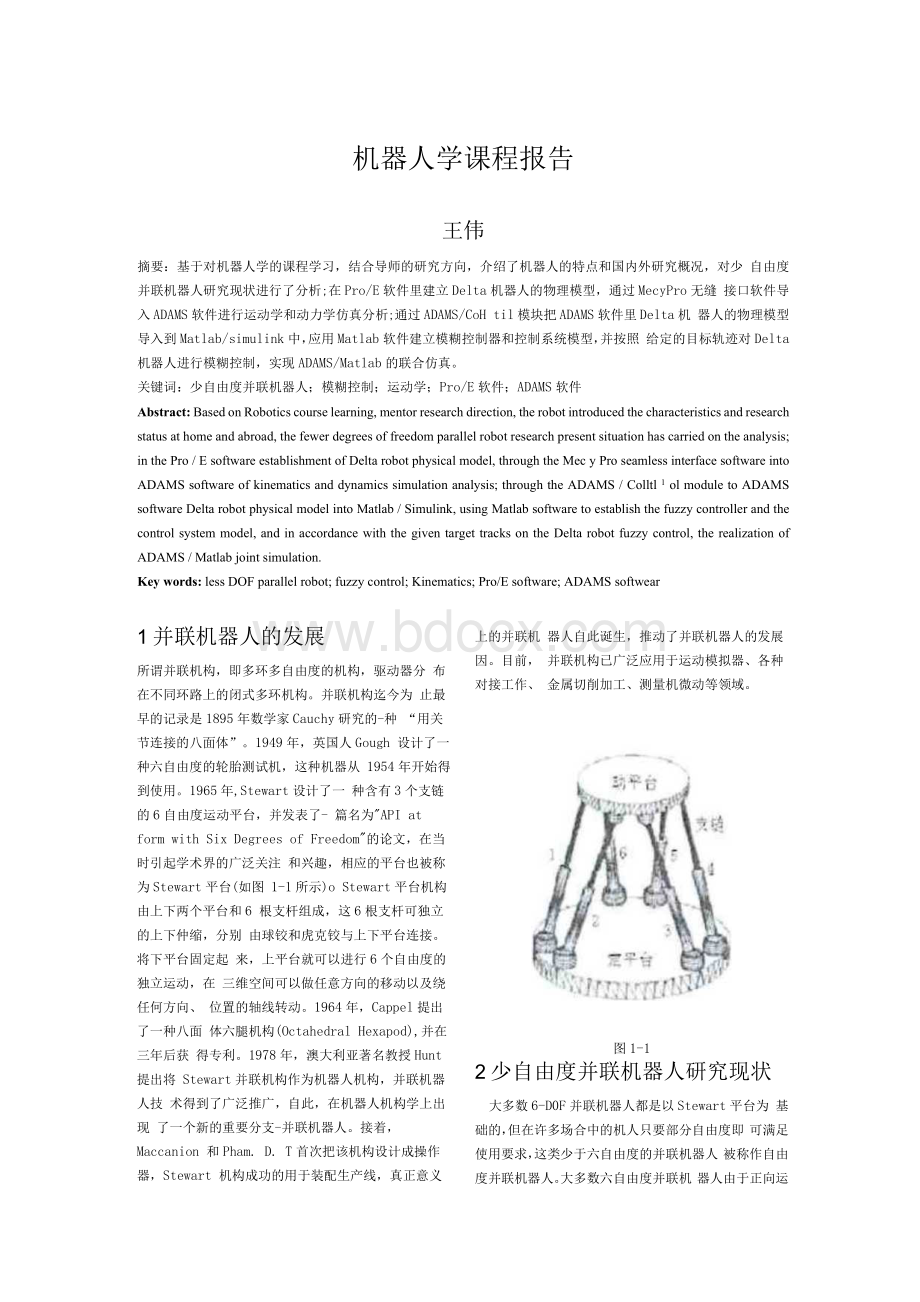
的论文,在当时引起学术界的广泛关注和兴趣,相应的平台也被称为Stewart平台(如图1-1所示)oStewart平台机构由上下两个平台和6根支杆组成,这6根支杆可独立的上下仲缩,分别由球铰和虎克铰与上下平台连接。
将下平台固定起来,上平台就可以进行6个自由度的独立运动,在三维空间可以做任意方向的移动以及绕任何方向、位置的轴线转动。
1964年,Cappel提出了一种八面体六腿机构(OctahedralHexapod),并在三年后获得专利。
1978年,澳大利亚著名教授Hunt提出将Stewart并联机构作为机器人机构,并联机器人技术得到了广泛推广,自此,在机器人机构学上出现了一个新的重要分支-并联机器人。
接着,Maccanion和Pham.D.T首次把该机构设计成操作器,Stewart机构成功的用于装配生产线,真正意义上的并联机器人自此诞生,推动了并联机器人的发展因。
目前,并联机构已广泛应用于运动模拟器、各种对接工作、金属切削加工、测量机微动等领域。
图1-1
2少自由度并联机器人研究现状
大多数6-D0F并联机器人都是以Stewart平台为基础的,但在许多场合中的机人只要部分自由度即可满足使用要求,这类少于六自由度的并联机器人被称作自由度并联机器人。
大多数六自由度并联机器人由于正向运动学求解困难、位和姿态存在祸合、工作空间小等问题,逐渐转移到少自由度并联机器人的研究,目前,少自由度并联机器人特别是三自由度并联机器人越来越成为机器人领的研究热点。
少自由度并联机器人与六自由度并联机器人相比,能够满足大多工业需要,降低了机构的成本和复杂度;
简化了并联机器人的结构模型,控制起来比较简单,所以少自由度并联机器人在社会生产各个领域都有着广阔的应用前景。
1983年Hunt提出一种3-RPs空间三自由度并联机构(如图1-2),随后Lee和shah对它进行了运动学研究。
1988年。
Lave提出了Delta平面机构(如图1-3),随后Pierrot等对它进行了深入的分析。
1959年、1990年Gosselin和Angeles又提出了平面和球面三自由度并联机构。
机构学研究方面,Herve分别在1991和1995年对并联机器人结构综合进行了研究,1999年黄真提出了3-PRs、3-TPT、3-CS等多种并联机构,并采用螺旋理论的方法研究了它们的矫时运动。
1999年Tisa介绍了-种新的结构综合系统方法,并研究了3-RUU,3-UPU,3-PUU的运动形式。
2000年赵铁石和黄真又提出了-种3-RRC并联机构。
随后,赵铁石构造出许多具有良好使用前景的新型空间少自由度并联机构。
2002年Tsai和Kim又对3-RPS并联机构的运动综合进行了研究。
2003年黄真提出一种基于少自由度并联机构的结构综合系统方法。
运动学方面,虽然少自由度并联机构的位置正解较容易些,但仍没有能够很好地解决。
1996年,Tisa提出了3-UPU并联机构并对它进行位置分析。
1999年,DiGregorio对3-UPU并联机构进行奇异形位分析,同年Tsai对3-UPU并联机构进行位置分析、优化设计以及雅可比分析。
1997年,Stamper等对3-RUU并联机构进行优化设计和工作空间分析。
1998年Carretero对3-RPS并联机构进行了位置反解分析以及工作空1司分析。
1999年,Tisa分析了3-RPS的位置正解。
2002年Badeseu优化了3-UPS并联机器人工作空间。
一般来讲,三自由度并联机器人具有三条支链,但近年来,具有四支链的三自
由度并联机器人也相继出现,Siciliano>
Fattach.Joshi等对它们进行了研究。
SameerA.Jashi通过对多种三自由度并联机器人进行比较研究,乂把三自由度并联机器人分为两大类,一类是动平台只具有三个移动的机构,如3-UPU、3-PUU、3-RUU,另一类是带寄生运动的机构(动平台三个移动和三个转动这六个变量中只有三个是独立的),如3-RsR、3-RRS、3-PRS和3-RPS。
对于4自由度和5自由度的并联机器人的研究相对较少。
Gosselin等曾提出4自由度和5自由度机构,这些机构由于是不对称的,因此不易作为机器人来应用。
从目前有关研究少自由度并联机器人的文章来看,其研究内容主要还是集中在机构运学方面阵。
图1-3
3机器人的展望
目前,国内外关于并联机器人的研究主要集中在机构学、运动学上,许多的的研究还处于初级阶段,很多的工作需要展开。
1、建立更加合理的并联机器人的运动学模型,使奇异形位、工作空间、灵巧度分析和机构设计等方面更加简单。
2、进一步研究并联机器人的动力学,推导其可控性和客观性的理论结果。
与传统机构动力分析相比,其研究的深度和广度还相差甚远。
3、研究并联机器人的各种可能的控制算法,对并联机器人实施控制,以达到预期的控制效果。
4、加强对少自由度并联机器人的研究。
随着科学技术的发展,并联机器人的这些研究会取得很大的成就。
4并联机器人的控制策略
控制是基于机器人运动学和动力学模型,根据具体的性能要求设计其控制算法,使机器人能按要求正常工作的理论和技术方法。
机器人是一个十分复杂的多输入多输出非线性系统,它具有时变、强藕合和非线性的动力学特征,其控制是十分复杂的。
由于测量和建模的不精确,再加上负载的变化以及外部扰动的影响,实际上无法得到机器人精确、完整的运动模型,有大量不确定性因素的存在。
机器人控制涉及自动化、计算机、传感器、人工智能、电子技术和机械工程等多种学科。
计算机的出现与人工智能的发展,会给机器人控制带来极其丰富的内容。
机器人的控制技术包括轨迹控制、力控制(柔顺控制)、分解运动控制(办调控制)、自适应控制、变结构控制、模糊控制、学习控制、生物控制、多机器人-协调控制等等(如图1-4所示)。
对于并联机器人的控制,目前还基木上沿用串联机器人的控制策略。
一个原因是针对串联机器人发展起来的传统控制体系己经发展到较高水平,并被广大用户所接受;
另一个原因是还没有为并联机器人开发出独特的硬件结构控制体系,这是并联机器人难以发挥优势的一个主要原因。
目前,国内外对机器人的控制方法大都采用传统的控制技术(如P1D控制)和现代控制技术(如柔顺控制、自适应控制、变结构控制),并得到不同程度的应用。
经典P1D控制结构简单,参数整定方便,可以通过输入输出的图形化可以直观显示PID调节的效果,因此在连续系统中最成熟、应用最广的-种控制方法。
但是这些方法不能对机器人的动力学特性实施主动和及时的控制,而且在许多情况下,由于并联机器人的控制过程复杂,导致无法建立并联机器人的数学模型,以至于用这些方法来解决这类对象往往难以凑效,得不到满意的结果。
此时,智能控制(如递阶控制、专家控制、模糊控制、神经控制、学习控制、进化控制)就应用而生。
模糊控制是-种新型的智能化控制方法,它模仿人工控制活动中人脑的模糊概念和成功的控制策略,运用模糊数学,把人工控制策略用计算机来实现,不依赖系统的精确数学模型,对系统参数变化不敏感,具有很强的兽棒性。
因此采用模糊控制对少自由度并联机器人进行控制是未来并联机器人控制的一个发展趋势。
图1-4
5并连机器人的模糊控制
5.1机器人的控制原理
5.1.1机器人基本控制原则
机器人控制问题是基于机器人运动学动力学模型,根据具体的性能指标设计其控制算法与系统,使机器人能按要求正常工作的理论与技术方法。
机器人运动学建模描述机器人末端执行器与各关节之间的运动关系,为结构设计提供运动特性分析方法,也是动力学建模与位姿轨迹控制的基础。
机器人动力学模型是基于运动学模型刚体动力学理论,建立驱动力合力矩与关节位移、速度和加速度之间的联系,模型为结构设计提供力学特性分析方法,为控制系统设计提供模型依据。
5.1.2控制系统的组成结构
机器人控制系统一般是以机器人单轴或多轴运动-协调为目的的控制系统,包括高性能的计算机及相应的系统硬件和控制算法软件。
机器人控制系统可分为4部分:
机器人及其感知器、环境、仟务、控制器。
机器人是由各种机构组成的装置,它通过感知器的内部传感器实现木体和环境状态的检测和信息交互,也是控制的最终口标;
环境即指机器人所处的周围环境,它包括
 升级会员
升级会员 