测量规范.docx
《测量规范.docx》由会员分享,可在线阅读,更多相关《测量规范.docx(26页珍藏版)》请在冰豆网上搜索。
测量规范
工程测量规范
GB50026—2007
2007—10—25发布2008—05—01实施
3.3导线测量
(Ⅰ)导线测量的主要技术要求
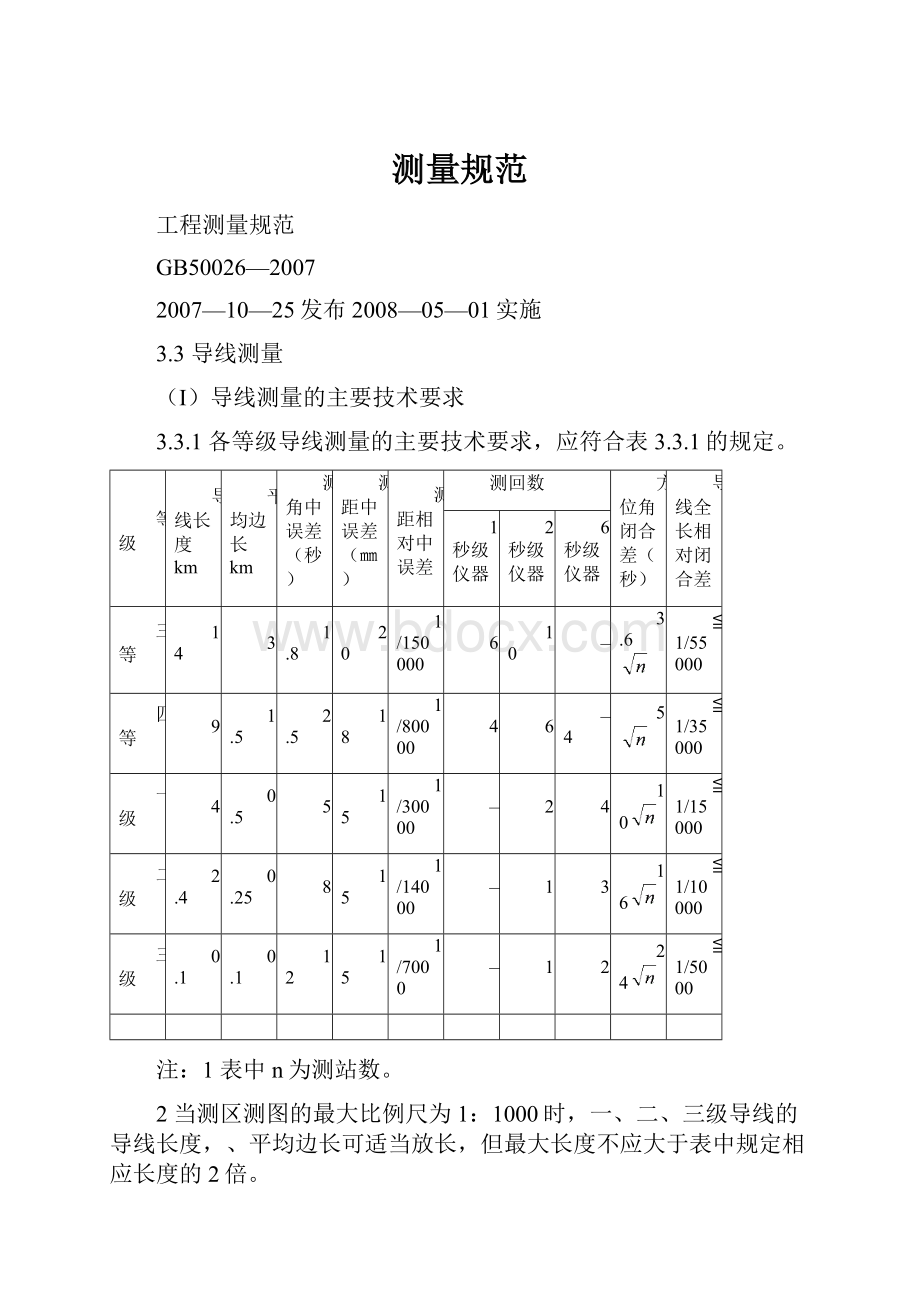
3.3.1各等级导线测量的主要技术要求,应符合表3.3.1的规定。
等级
导线长度km
平均边长km
测角中误差(秒)
测距中误差(㎜)
测距相对中误差
测回数
方位角闭合差(秒)
导线全长相对闭合差
1秒级仪器
2秒级仪器
6秒级仪器
三等
14
3
1.8
20
1/150000
6
10
—
3.6
≦1/55000
四等
9
1.5
2.5
18
1/80000
4
6
—4
5
≦1/35000
一级
4
0.5
5
15
1/30000
—
2
4
10
≦1/15000
二级
2.4
0.25
8
15
1/14000
—
1
3
16
≦1/10000
三级
0.1
0.1
12
15
1/7000
—
1
2
24
≦1/5000
注:
1表中n为测站数。
2当测区测图的最大比例尺为1:
1000时,一、二、三级导线的导线长度,、平均边长可适当放长,但最大长度不应大于表中规定相应长度的2倍。
3.3.2当导线平均边长较短时,应控制导线边数不超过表3.3.1相应等级导线长度和平均边长算得的边数;当导线长度小于表3.3.1规定长度的1/3时,导线全长的绝对闭合差不应大于13㎝。
3.3.3导线网中,结点与结点、结点与高级点之间的导线段长度不应大于表3.3.1中相应等级规定长度的0.7倍。
(Ⅱ)导线网的设计、选点与埋埋石
3.3.4导线网的布设应符合下列规定:
1导线网用作测区的首级控制时,应布设成环形网,且宜联测2个已知方向。
2加密网可采用单一附合导线或结点导线网形式。
3结点间或结点与已知点间的导线段宜布设成直伸形状,相邻边长不宜相差过大,网内不同环节上的点也不宜相距过近。
3.3.5导线点位的选定,应符合下列规定:
1点位应选在土质坚实、稳固可靠、便于保存的地方,视野应相对开阔,便于加密、扩展和寻找。
2相邻点之间应通视良好,其视线距障碍物的距离,三、四等不宜小于1.5m;四等以下宜保证便于观测,以不受旁折光的影响为原则。
3当采用电磁波测距时,相邻点之间视线应避开烟囱、散热塔、散热池等发热体及强电磁场。
4相邻两点之间的视线倾角不宜过大。
5充分利用旧有控制点。
3.3.6导线点的埋石应符合附录B的规定。
三、四等点应绘制点之记,其他控制点可视需要而定。
(Ⅲ)水平角观测
3.3.7水平角观测所使用的全站仪、电子经纬仪和光学经纬仪,应符合下列相关规定:
1照准部旋转轴正确性指标:
管水准器气泡或电子水准器长气光在各位置的读数较差,1秒级仪器不应超过2格,2秒级仪器不应超过1格,6秒级仪器不应超过1.5格。
2光学经纬仪的测微器行差及隙动差指标:
1秒级仪器不应大于1秒,2秒级仪器不应大于2秒。
3水平轴不垂直于垂直轴之差指标;1秒级仪器不应超过10秒,2秒级仪器不应超过15秒,6秒级仪器不应超过20秒。
4补偿器的补偿要求:
在仪器补偿器的补偿区间,对观测成果应能进行有效补偿。
5垂直微动旋转使用时,视准轴在水平方向上不产生偏移。
6仪器的基座在照准部施转时的位移指标:
1秒级仪器不应超过0.3秒,2秒级仪器不应超过1秒,6秒级仪器不应超过1.5秒。
7光学(或激光)对中器的视轴(或射线)与竖轴的重合度不应大于1㎜。
3.3.8水平角观测宜采用方向观测法,并符合下列规定:
1方向观测法的技术要求,不应超过表3.3.8的规定。
表3.3.8水平角方向观测法的技术要求
等级
仪器精度等级
光学测微器两次重合读数之关(秒)
半测回归零差(秒)
一测回内2C互差(秒)
同一方向值各测回较差(秒)
四等及以上
1秒级仪器
1
6
9
6
2秒级仪器
3
8
13
9
一级及以下
2秒级仪器
—
12
18
12
6秒级仪器
—
18
—
24
注;1全站仪、电子经纬仪水平角观测时不受光学测微器两次重合读数之差指标的限制。
2当观测方向的垂直角超过±30的范围时,该方向2C互差可按相邻测回同方向进行比较,其值应满足表中一测回内2C互差的限值。
2当观测方向不多于3个时,可不归零。
3当观测方向多于6个时,可进行分组观测。
分组观测应包括两个共同方向(其中一个为共同零方向)。
其两组观测角之差,不应大于同等级测角中误差的2倍。
分组观测的最后结果,应按等权分组观测进行测站平差。
4各测回间应配置度盘。
度盘配置应符合附录C的规定。
5水平角的观测值应取各测回的平均数作为测站成果。
3.3.9三、四等导线的水平角观测,当测站只有两个方向时,应在观测总测回中以奇数测回的度盘位置观测导线前进方向的左角,以偶数测回的度盘位置观测导线前进方向右角。
左右角的测回数为总测回数的一半。
但在观测右角时,应以左角起始方向为准变换度盘位置,也可用起始方向的度盘位置加上左角的概值在前进方向配置度盘。
左角平均值与右角平均值之和与3600之差,不应大于本规范表3.3.1中相应等级导线测角中误差的2倍。
3.3.10水平角观测的测站作业,应符合下列规定:
1仪器或反光镜的对中误差不应大于2mm。
2水平角观测过程中,气泡中心位置偏离整置中心不宜超过1格。
四等及以上等级的水平角观测,当观测方向的垂直角超过±30的范围时,宜在测回间重新整置气泡位置。
有垂直轴补偿器的仪器,可不受此款限制。
3如受外界因素(如地震)的影响,仪器的补偿器无法正常工作或超出补偿器的补偿范围时,应停止观测。
4当测站或照准目标偏心时,应在水平角观测前或观测后测定归心元素。
测定时,投影示误三角形的最长边,对于标石、`仪器中心的`投影不应大于5mm,对于照准标志中心的投影不应大于10mm。
投影完毕后,除标石外,其他各投影中心均应描绘两个观测方向。
角度元素应量至15秒,长度元素应量至1mm。
3.3.11水平角观测误差超限时,应在原来度盘位置上重测,并应符合下列规定:
1一测回内2C互差或同一方向值各测回较差超限时,应重测超限方向,并联测零方向。
2下半测回归零差或零方向的2C互差超限时,应重测该测回。
3若一测回中重测方向数超过总方向数的1/3时,应重测该测回。
当重测的测回数超过总测回数的1/3时,应重测该站。
3.3.12首级控制网所联测的已知方向的水平角观测,应按首级网相应等级的规定执行。
3.3.13每日观测结束,应对外业记录手簿进行检查,当使用电子记录时,应保存原始观测数据,打印输出相关数据和预先设置的各项限差。
(Ⅳ)距离测量
3.3.14级及以上等级控制网的边工,应采用中、短程全站仪或电磁波测距仪测距,一组以下也可采用普通钢尺量距。
3.3.15本规范对中、短程测距仪器的划分,短程为3km以下,中程为3~15km。
3.3.16测距仪器的标称精度,按(3.3.16)式表示。
mD=a+b×D(3.3.16)
式中,mD—测距中误差(㎜)
a—标称精度中的固定误差(㎜)
b—标称精度中的比例误差系数(㎜/km)
D—测距长度(km)
3.3.17测距仪器及相关的气象仪表,应及时校验。
当在高海拔地区使用空盒气压表时,宜选当地气象台(站)校准。
3.3.18各等级控制网边长测距的主要技术要求,应符合表3.3.18的规定。
表3.3.18测距的主要技术要求
平面控制网等级
仪器精度等级
每边测回数
一测回读数较差(秒)
单程各测回较差(㎜)
往返测距较差(㎜)
往
返
三等
5mm级仪器
3
3
≦5
≦7
≦2(a+b×D)
10mm级仪器
4
4
≦10
≦15
四等
5mm级仪器
2
2
≦5
≦7
10mm级仪器
3
3
≦10
≦15
一级
10mm级仪器
2
—
≦10
≦15
—
二、三级
10mm级仪器
1
—
≦10
≦15
注;1测回是指照准目标一次,读数2~4次的过程。
2困难情况下,边长测距可采取不同时间段测量代替往返观测。
3.3.19测距作业,应符合下列规定:
1测站对中误差不应大于2㎜。
2当观测数据超限时,应重测整个测回,如观测数据出现分群时,应分析原因,采取相应措施重新观测。
3四等及以上等级控制网的边长测量,应分别量取两端点观测始末的气象数据,计算时应取平均值。
4测量气象元素的温度计宜采用通风干湿温度计,气压表宜选用高原型空盒气压表;读数前应将温度计悬挂在离开地面和人体1.5m以外阳光不能直射的地方,且读数精确至0.2℃;气压表应置平,指针不应滞阻,且读数精确至50Pa。
5当测距边用电磁波测距三角高程测量方法测定的高差进行修正时,垂直角的观测和对向观测高差较差要求,可按本规范第4.3.2和和4.3.3条中五等电磁波测距三角高程测量的有关规定放宽1倍执行。
3.3.20每日观测结束,应对外业记录进行检查。
当使用电子记录时,应保存原始观测数据,打印输出相关数据和预先设置的各项限差。
3.3.21普通钢尺量距的主要技术要求,应符合表3..3.21的规定。
表3.3.21普通钢尺量距的主要技术要求
等级
边长量距较差相对误差
作业尺数
量距总次数
定线最大偏差㎜
尺段高差较差㎜
读定次数
估读值至㎜
温度读数值至℃
同尺各次或同段各尺的较差㎜
二级
1/20000
1~2
2
50
≦10
3
0.5
0.5
≦2
三级
1/10000
1~2
2
70
≦10
2
0.5
0.5
≦3
注:
1量距边长应进行温度、坡度和尺长改正。
2当检定钢尺时,其相对误差不应大于1/100000。
(Ⅴ)导线测量数据处理
3.3.22当观测数据中含有偏心测量成果时,应首先进行归心改正计算。
3.3.23水平距离计算,应符合下列规定:
1测量的斜距,须经气象改正和仪器的加、乘常数改正后才能进行水平距离计算。
2两点间的高差测量,宜采用水准测量。
当采用电磁波测距三角高程测量时,基高差应进行大气折光改正和地球曲率改正。
3水平距离可按(3.3.23)式计算:
DP=
(3.3.23)
式中,DP---测线的水平距离(m)
S---经气象及加、乘常数等改正后的斜距(m)
h---仪器的发射中心与反光镜的反射中心之间的高差(m)
3.3.24导线网水平角观测的测角中误差,应按(3.3.24)式计算;
mβ=
(3.3.24)
式中,fβ---导线环的角度闭合差或附合导线的方位角闭合差(秒)
n---计算fβ时的相应测站数;
N---闭合环及附合导线的总数。
3.3.25测距边的精度评定,应按(3.3.25-1)、(3.3.25-2)式计算;当网中的边长相差不大时,可按(3.3.25-3)式计算网的平均测距中误差。
1单位权中误差:
μ=
3.3.25-1
式中,d—各边往、返测的距离较差(㎜)
n—测距边数;
P—各边距离的先验权,其值为
,σD为测距的先验中误差,可按测距仪器的标称精度计算。
2任一边的实际测距中误差:
mDI=μ
3.3.25-2
式中,mDI---第i边的实际测距中误差(㎜)
Pi—第i边距离测量的先验权。
3网的平均测距中误差:
mDI=
3.3.25-3
式中,mDI---平均测距中误差(㎜)。
3.3.26测距边长的归化投影计算,应符合下列规定:
1归算到测区平均高程面上的测距边长度,应按(3.3.26-1)式计算:
DH=DP(1+
)3.3.26-1
式中,DH—归算到测区平均高程面上的测边长度(m)
DP—测线的水平距离(m)
HP---测区的平均高程(m)
HM—测距边两端点的平均高程(m)
RA---参考椭圆体在测距边方向法截弧的曲率半径(m)
2归算到参考椭圆球面上的测距边长度,应按(3.3.26-2)式计算:
DO=DF(1-
))+3.3.26-2
式中,DO—归算到参考椭圆面上的测距边长度(m)
Hm-=---测区大地水准面高出参考椭圆面的高差(m)
3测距边在高斯投影面上的长度,应按(3.3.26-3)式计算:
Dg=D0(1+
+
)(3.3.26-3)
式中,Dg+---测距边在高斯投影面上的长度(m)
Ym---测距边两端点横坐标的平均值(m)
RM---测距边中点处在参考椭圆球面上的平均曲率半径(m)
∆y---测距边两端点横坐标的增量(m)
3.3.27一级及以上等级的导线网计算,应采取严密平差法;二、三级导线网,可根据需要采用严密或简化方法平差。
当采用简化方法平差时,成果表中的方位角和边长应采用坐标反算值。
3.3.28导线网平差时,角度和距离的先验中误差,可分别按3..3.24条和3。
3。
25条中的方法计算,也可用数理统计等方法求得的经验公式估算先验中误差的值,并用以计算角度及边长的权。
3.3.29平差计算时,对计算略图和计算机输入数据应进行仔细校对,对计算结果应进行检查。
打印输出的平差成果,应包括起算数据、观测数据以及必要的中间数据。
3.3.30平差后的精度评定,应包括有单位权中误差、点位误差椭圆参数或相对点位误差椭圆参数、边长相对中误差或点位中误差等。
当采用简化平差时,平差后的精度评定,可作相应简化。
3.3.31内业计算中数字取位,应符合表3.3.31的规定。
表3.3.31内业计算中数字取位要求
等级
观测方向值及各项修正(秒)
边长观测值及各项修正数(m)
边长与坐标(m)
方位角(秒)
三、四等
0.1
0.001
0.001
0.1
一级及以下
1
0.001
0.001
1
3.4三角形网测量
(Ⅰ)三角形网测量的主要技术要求
3.4.1各等级三角形网测量的主要技术要求,应符合表3.4.1的规定。
表3.4.1三角形网测量的主要技术要求
等级
平均边长km
测角中误差(秒)
测边相对中误差
最弱边边长相对中误差
测回数
三角形最大闭合差(秒)
1秒级仪器
2秒级仪器
6秒级仪器
二等
9
1
≦1/250000
≦1/120000
12
—
—
3.5
三等
4.5
1.8
≦1/15000
≦1/70000
6
9
—
7
四等
2
2.5
≦1/100000
≦1/100000
4
6
—
9
一级
1
5
≦1/40000
≦1/40000
—
2
4
15
二级
0.5
10
≦1/10000
≦1/20000
—
1
2
30
注:
当测区测图的最大比例尺为1:
1000时,一、二级网的平均边长可适当放长,但不应大于表中规定长度的2倍。
3.4.2三角形网中的角度宜全部观测,边长可根据需要选择观测或全部观测;观测的角度和边长均应作为三角形网中的观测量参与瑳差计算。
3.4.3首级控制网定向时,方位角角递宜联测2个已知方向。
(Ⅱ)三角形网的设计、选点与埋石
3.4.4作业前,应进行资料收集和现场踏勘,对收集到的相关控制资料和地形图(以1:
10000~1:
100000为宜)应进行综合分析,并在图上进行网形设计和精度估算,在满足精度要求的前提下,合理确定网的精度等级和观测方案
3.4.5三角形网的布设,应符合下列要求:
1首级控制网中的三角形,宜布设为近似等边三角形。
其三角形的内角不应小于300;当受地形条件限制时,个别角可放宽,但不应小于250。
2加密的控制网,可采用插网、线形网或插点等形式。
3三角形网点位的选定,除应符合本规范3.3.5条1~4款的规定外,二等网视线距障碍物的距离不宜小于2m。
3.4.6三角形网点位的埋石应符合附录B的规定,二、三、四等点应绘制点之记,其他控制点可视需要而定。
(Ⅲ)三角形网观测
3.4.7三角形网的水平角观测,宜采用方向观测法。
二等三角形网也可采用全组合观测法。
3.4.8三角形网的水平角观测,除满足3.4.1条外,其他要求按本章第3.3.7条、3.3.8条、及3.3.10~3.3.13条执行。
3.4.9二等三角形网测距边的边长测量除满足第3.4.1条和表3.4.9外,其他技术要求按本章第3.3.14~3.3.17条及3.3.19条、3.3.20条执行。
表3.4.9二等三角形网边长测量主要技术要求
平面控制网等级
仪器精度等级
每边测回数
一测回读数较差㎜
单程各测回较差㎜
往返较差㎜
往
返
二等
5㎜级仪器
3
3
≦5
≦7
≦2(a+b·D)
注:
1测回是指照准目标一次,读数2~4次的过程。
2根据具体情况,测边可采取不同时间段测量代替往返观测。
3.4.10三等及以下等级的三角形网测距边的边长测量,除满足3.4.1条外,其他要求按本章第3.3.14~3.3.20条执行。
3.4.11二级三角形网的边长也可采用钢尺量距,按本章3.3.21条执行。
(Ⅳ)三角形网测量数据处理
3.4.12当观测数据中含有偏心测量成果时,应首先进行归心改正计算。
3.4.13三角形网的测角中误差,应按(3.4.13)式计算:
mβ=
(3.4.13)
式中,mβ----测角中误差(秒)
W---三角形闭合差(秒)
n---三角形的个数
3.4.14水平距离计算和测边精度评定按本章3.3.23条和3.3.25条执行。
3.4.15当测区需要进行高斯投影时,四等及以上等级的方向观测值,应进行方向改化计算。
四等网也可采用简化公式。
方向改化计算公式:
δ1、2=
(x1-x2)(2y1+y2)3.4.15-1
δ2、1=
(x2-x1)(y1+2y2)3.4.15-2
方向改化简化计算公式:
δ1、2=-δ2、1=
(x1-x2)ym3.4.15-3
式中,δ1、2---测站点1向照准点2观测方向的方向改化值(秒)
δ2、1---测站点2向照准点1观测方向的方向改化值(秒)
x1y1x2y2---1、2两点的坐标值(m)
Rm---测距边中点处在参考椭圆面上的平均曲率半径(m)
Ym---1、2两点的横坐标平均值(m)
3.4.16高山地区二、三等三角形网的水平角观测,如果垂线偏差和垂直角较大,其水平方向观测值应进行垂线偏差的修正。
3.4.17测距边长度的归化投影计算,按本章第3.3.26条执行。
3.4.18三角形外业观测结束后,应计算网的各项条件闭合差。
各项条件闭合差不应大于相应的限值。
1角—极条件自由项的限值。
Wj=2
3.4.18-1
式中,Wj---角—极条件自由项的限值;
mβ-----相应等级的测角中误差(秒)
β---求距角。
2边(基线)条件自由项的限值。
Wb=2
3.4.18-2
式中,WB---边(基线)条件自由项的限值;
、
---起始边边长相对中误差。
3方位角条件自由项的限值。
Wf=2
3.4.18-3
式中,Wf---方位角要件自由项的限值(秒)
Ma1ma2---起始方位角中误差(秒)
n---推算路线所经过的测站数。
4固定角自由项的限值。
WG=2
3.4.18-4
式中,Wg----固定角自由项的限值(秒)
Mg---固定角的角度中误差(秒)
5边—角条件的限值
三角形中观测的一个角度与由观测边长根据各边平均测距相对中误差计算所得的角度限差,应按下式进行检核:
Wr=2
3.4.18-5
式中,Wr---观测角与计算角的角值限差(秒)
---各边平均测距相对中误差
α、β---三角形中观测角之外的另两个角
mβ---相应等级的测角中误差(秒)
6边—极条件自由项的限值。
WZ=2
3.4.18-6
αw=cotαi+cotβi
αf=cotαi±cotβi-1
式中,WZ---边-极条件自由项的限值(秒)
αW----与极点相对的外围边两端的两底的余切函数之和
αf---中点多边形中与极点相连的辐射边两侧的相邻底角的余切函数之和;四边形中内辐射边两侧的相邻底角的余切函数之和以及外侧的两辐射边的相邻底角的余切函数之差。
i—三角形编号。
3.4.19三角形网平差时,观测角(或观测方向)和观测边均应视为观测值参与平差,角度和距离的先验中误差,应按本规范第3.4.13条和3.3.25条中的方法计算,也可用数理统计等方法求得的经验公式估算先验中误差的值,并用以计算角芳(或方向)及边长的权,平差计算按本章第3.3.29~3.3.30条执行。
3.4.20三角形网内业计算中数字取位,二等应符合表3.4.20的规定,其余各等级应符合本规范表3.3.31的规定。
表3.4.20三角形网内业计算中数字取位要求
等级
观测方向值及各项修正数(秒)
边长观测值及各项修正数(m)
边长与坐标(m)
方位角(秒)
二等
0.01
0.0001
0.001
0.01
4高程控制测量
4.1一般规定
4.1.1高程控制的精度等级的划分,依次为二、三、四、五等,各等级高程控制宜采用水准测量,四等及以下等级可采用电磁波测距三角高程测量,五等也可采用GPS拟合高程测量。
4.1.2首级高程控制网的等级,应根据工程规模、控制网的用途和精度要求合理选择。
首级网应布设成环形网,加密网宜布设成附合路线或结点网。
4.1.3测区的高程系统,宜采用1985国家高程基准。
在已知高程控制网的地区测量时,可沿用原有的高程系统;当小测区联测有困难时,也可采用假定高程系统。
4.1.4高程控制点间的距离,一般地区应为1~3km,工业厂区、城镇建筑区宜小于1km。
但一个测区及周围至少应有3个高程控制点。
4.2水准测量
4.2.1水准测量的主要技术要求,应符合表4.2.1的规定。
表4.2.1水准测量的主要技术要求
等级
每千米高差全中误差㎜
路线长度km
水准仪型号
水准尺
观测次数
往返较差、附合或环线闭合差
与已知点联测
附全或环线
平地㎜
山地㎜
二等
2
—
DS1
因瓦
往返各一次
往返各一次
4
—
三等
6
≦50
DS1
因瓦
往返各一次
往一次
12
4
DS3
双面
往返各一次
四等
10
≦16
DS3
双面
往返各一次
往一次
20
6
五等
15
-
DS3
单面
往返各一次
往一次
30
—
注:
1结点之间或结点与高级点之间,其路线的长度,不应大于表中规定的0.7倍。
2L为往返测段、附合或环线的水准路线长度(km);n为测站数。
3数字水准仪测量的技术要求和同等级的光学水准信相同。
4.2.
 升级会员
升级会员 