LEC系列电动执行器控制器简易操作手册.docx
《LEC系列电动执行器控制器简易操作手册.docx》由会员分享,可在线阅读,更多相关《LEC系列电动执行器控制器简易操作手册.docx(26页珍藏版)》请在冰豆网上搜索。
LEC系列电动执行器控制器简易操作手册
LEC系列电缸简易操作手册
LEC系列控制器为SMC开发的新型电缸控制器。
适用范围:
LES系列电动滑台LEY系列出杆式电缸LEF系列无杆式电缸
LEH系列电动夹爪
1、产品特点:
①内部可存储64步程序
②可实现精确定位、力矩输出
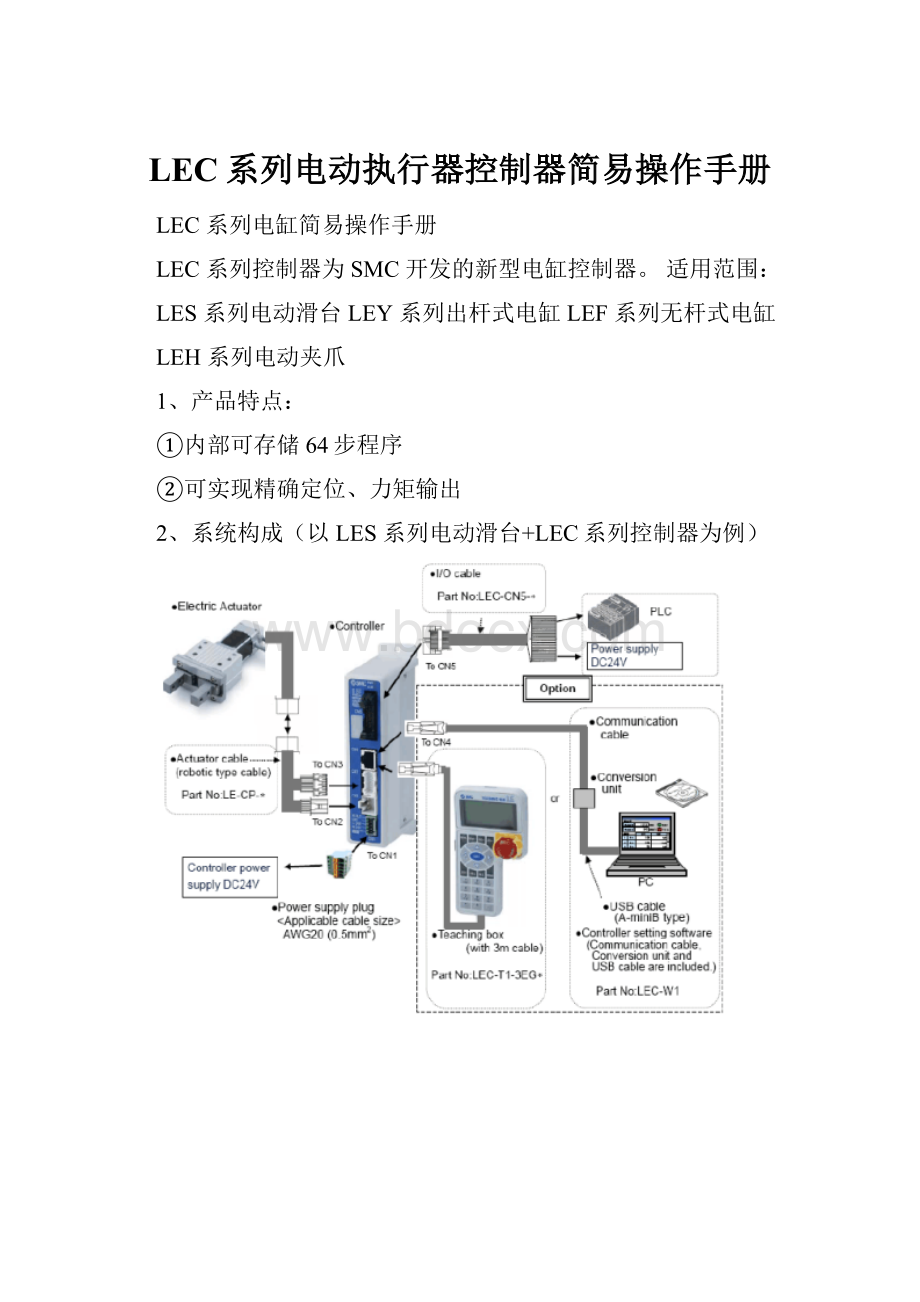
2、系统构成(以LES系列电动滑台+LEC系列控制器为例)
3、产品结构
4、各端口配线及功能详解
4-1CN1端口-DC24V电源接口
端子号0VM24VC24VEMGBKRLS
急停信号配线(注意:
常闭信号,闭合时正常使用,断开时急停)
功能电源-电机电源+控制端口电源+急停信号+解锁信号+
解锁信号配线(注意:
闭合时解锁,断开时锁紧,适用于带锁型电缸)
4-2CN2端口-电机电源接口/CN3端口-电机编码器接口/CN4端口-通信线缆接口以上3个端口均为标准插头,直接插入端口即可。
4-3CN5端口-控制I/O接口CN5端口用标准线缆示意图:
配线图(以NPN型为例)
输入信号:
线号A1A2A3A4A5A6A7A8A9A10A11A12A13线号B1B2B3B4B5B6B7B8B9B10B11B12B13
线色茶/黑1茶/红1
名称COM+COM-
说明
控制端口DC24V正控制端口DC24V负
黄/黑黄/红浅绿/黑浅绿/红灰/黑灰/红白/黑1茶/黑2茶/红2黄/黑2线色
SETUPDRIVERESETSVON名称
原点回归运行报警取消伺服ON
说明
白/红暂时停止(可继续)
步选择信号(2进制)。
输出信号:
黄/红浅绿/黑浅绿/红步选择输出信号灰/黑(2进制)灰/红白/黑白/红运行中茶/黑区域内茶/红原点回归完成黄/黑公差内
黄/红伺服准备完成浅绿/黑急停中浅绿/红报警
注意:
上表中粗体红字部分的线为必接线,否则电缸无法正常使用。
其余线缆可根据实际需要选接。
DC24V正正DC24V负负步选择信号
2进制组合选定要执行的程序步号,OFF表示0,ON表示1。
IN3
IN2
IN1
IN0
步号
。
。
。
。
。
。
输出信号SVRE(B11)为ON时,SETUP信号闭合将启动原点回归动作。
原点回归过程中,输出信号BUSY(B7)信号为ON,原点回归完成后,输出信号SETON(B9)和INP(B10)信号变为ON。
HOLD信号闭合时,执行器马上以最大的加速度减速、停止,并且保持在停止位置。
HOLD信号断开时,执行器恢复运行并执行完未完成的行程。
原点回归
暂时停止
注意:
HOLD信号闭合时,DRIVE信号失效。
DRIVE信号闭合时,控制器将扫描IN0~IN5的端口状态已确定选定的程序步号,开始执行指定这一步程序。
DRIVE信号断开时,输出信号OUT0~OUT5将输出正在运行的程序步号。
RESET信号闭合时,控制器将输出信号ALARM(B13)变为ON(异常已排除,异常未排除时,ALARM信号仍为OFF),同时OUT0~OUT5和INP信号输出将变为OFF。
SVON信号闭合时,电机通电,产生保持力,输出信号SVRE变为ON。
运行
重启
伺服ON
执行器开始运行后当输入信号DRIVE变为OFF时,OUT0~OUT5将以2进制的组合使特定端口信号变为ON,显示运行中的程序步号。
注意:
1-当输入信号RESET闭合时,OUT0~OUT5变为OFF。
2-ALARM状态下,OUT0~OUT5输出报警组别。
3-力矩输出模式下,如果执行器位置超出指定范围时,OUT0~OUT5变为OFF。
执行器运行过程中,BUSY信号输出为ON。
注意:
力矩模式下,仅有力矩输出而无位置移动时,BUSY为OFF。
当执行器位置处于程序指定的AREA1和AREA2的范围内时,AREA信号输出为ON。
原点回归完成时,SETON信号输出为ON,未完成之前为OFF。
原点回归时:
在原点位置±指定公差范围内时变为ON;
定位时:
在指定位置±指定公差范围内时变为ON;力矩输出时:
输出力矩达到“TriggerLV”指定水平时。
注意:
力矩输出模式下,当EMG急停信号输入或RESET重启信号输入时,力矩输出停止。
电机通电后,SVRE信号变为ON;电机断电后,SVRE变为OFF。
正常运行时,此信号为ON状态;EMG信号断开时,此信号变为OFF。
正常运行时,此信号为ON状态;发生异常时,此信号变为OFF。
步选择输出
运行中
区域内
原点回归
完成公差内
伺服准备完成
急停中报警
控制器在不同的状态下输出信号的情况:
5、编程软件的安装、使用
5-1编程软件的安装
①将软件安装盘放入电脑光驱,然后用通信线缆将电脑与控制器联接。
②系统出现入如图所示提示,按照图中红圈指示操作。
③点击“NEXT”后将出现如下界面,按照图中红圈指示操作。
④点击“NEXT”后将出现如下界面,按照图中红圈指示操作。
⑤点击“FINISH”,完成软件安装。
⑥安装完成后,桌面上将出现如下图标。
双击即可进入编程软件。
5-2通信端口匹配
①在桌面的“我的电脑”图表上点击鼠标右键,选择“属性”
,出现如下界面,按红圈指示操作。
②点击“设备管理器”查看系统分配给LEC系列控制器的端口编号(例:
COM4),记录下来。
注意:
如果在“设备管理器”下面的“端口(COM&LPT)”一栏下没有发现SMC产品项及端口号,请检查“设备管理器”界面下的“端口(COM&LPT)”及“通用总线串行控制器”两项中有无黄色问号项,如果有,则驱动未能完全安装。
请在黄色问号项上点击右键并选择“更细驱动程序”,并将安装路径指向安装源文件存储位置,完成后黄色问号消失,产品可正常使用。
5-3编程软件的使用
双击“ATCCONTROLLER”图标,将出现如下界面,选择“NormalMode”(标准模式)或者“EasyMode”(简易模式)。
5-3-1“NormalMode”(标准模式)
①点击“NormalMode”进入如下界面,因为通信端口尚未匹配,状态栏显示“Offline”。
②在命令栏选择“Action”/“System”/“Setting”,进入端口设置界面
③将端口号设置为前面记录的端口号,然后在命令栏选择“Action”/“System”/“Reset”,控制器将重新扫描端口信息。
如果设置正确,状态栏会显示出当前控制器联接的执行器型号。
5-3-2命令栏
区域1:
命令菜单。
区域2:
报警快捷键
区域3:
执行器型号
区域4:
试运行快捷键。
程序步号选择栏,程序试运行(Go),单步运行(Step,停止(Stop)和暂停(HOLD)。
区域5:
功能快捷键。
包括安全速度切换(SafeSpeed),锁打开/关闭(Brake)和模式切换(TestMode)和(MonitorMode)。
区域6:
重启快捷键。
可用于报警清除,运行停止。
①File:
程序步数据:
下设SAVE(保存),LOAD(载入)命令
参数:
下设SAVE(保存),LOAD(载入)命令
报警:
下设SAVE(保存)命令
捕捉:
下设Window(窗口)命令,抓取当前窗口截图
打印:
下设Window(窗口)、StepData(程序步数据)、
Parameter(参数)命令
退出本软件
②View:
下设命令包括
Status:
监控界面
Teaching:
示教界面
Alarm:
报警界面
StepData:
编程界面
Parameter:
参数界面
DriveTest:
试运行界面
StatusBar:
状态条
②-1Status:
监控界面。
监控各个输入、输出端口的ON/OFF状态。
②-2Teaching:
示教界面。
此界面下可以对执行器的运行进行手动控制。
DIRECT:
伺服OFF(可用手移动执行器位置)。
RTNORIG:
原点回归。
Stop:
运行停止。
JOG<-:
向电机端移动“Movedistance”指定的距离。
JOG->:
向电机远端移动“Movedistance”指定的距离。
MOV-:
向电机端移动MOV+:
向电机远端移动
注意:
示教界面仅在测试模式(TestMode)下可用,如图所示。
点击右上角的MonitorMode切换到测试模式(TestMode)下即可使用示教界面。
②-3Alarm:
报警界面。
查看报警代码和报警内容。
按“RESET”清除报警。
②-4StepData:
程序编写界面。
程序的编写、保存/打开、上传/下载。
名称
设定范围
手持控制器无效AbsoluteRelative
说明
说明
此步程序无效
目标位置以绝对坐标0点为基准目标位置以当前位置为基准
程序步号软件MoveM
3种可选项
空白AbsoluteRelative
Speed(mm/s)允许上限Position(mm)Acceleration(mm2/s)Deceleration(mm2/s)
Stroke-/+范围内1~允许上限1~允许上限
向目标位置移动的速度。
目标位置或移动距离。
加速至指定速度时的加速度。
减速至0的加速度。
PushingForce
(%)
模式
1~允许上限
定位力矩输出
设定值01~100
说明
执行器移动至指定位置
执行器移动至指定位置,同时输出指定力矩
注:
力矩输出时,不同的执行器允许值上限也不同,请参考样本。
TriggerLV(%)
当力矩输出超过此设定值时,INP信号变为ON。
单位-%注:
此参数仅在力矩输出时有效。
此参数用于设置力矩输出时执行器的运行速度。
如果速度过大,执行器或工件可能因冲击过大受损,因此,设置时请参照样本。
单位-%注:
此参数仅在力矩输出时有效。
定位过程中执行器的最大输出力矩。
设定使输出信号AREA变为ON的位置区间。
AREA2应大于AREA1。
注:
若AREA1>AREA2,将出现“StepDataAlarm1”报警。
若AREA1=AREA2=0,无报警,输出信号AREA为OFF。
定位时:
当执行器运行至Position±Inposition范围内时,输出信号INP变为ON。
力矩输出时:
设定力矩输出动作的范围。
当执行器运行超出此范围时,力矩输出停止,且输出信号INP不能变为ON。
1~允许上限
PushingSpeed(mm2/s)
1~允许上限
MovingForce(%)允许上限Area1(mm)Area2(mm)Inposition
(mm)
Stroke-/+范围内
1~允许上限
注:
表中的“允许上限”多取决于执行器和基础参数设置。
②-5Parameter:
参数界面。
部分基础参数的设定、修改。
生效方式:
XX—写入控制器即可生效,X—写入后重启控制器方可生效。
基本参数设置:
项目说明ControllerID控制器编号。
IOpatternIO类型ACC/DECpattern速度驱动类型S-motionrate行程上限Stroke+
行程下限Stroke-
速度上限Max.Speed
加速度上限Max.Acc/Dec
原点确认公差Definposition
执行原点回归命令时,执行器到达的位置ORIGoffset
输出力上限Max.force
1-基本参数+原点回归参数+程序Paraprotect
2-基本参数+原点回归参数
设置手持控制器的状态Enableswitch
执行器型号Unitname
W-AREA1W-AREA2
ORIGcorrect
原点回归参数设置:
项目ORIGmodeORIGlimitORIGtimeORIGspeedORIGacc/decCreepspeedORIGsensor
名称原点模式原点范围原点回归时间原点回归速度爬行速度原点开关
设定范围
说明
ORIGdirection原点位置
设定范围1~32不可更改不可更改不可更改
生效×---------
参考执行器信息××参考执行器信息××参考执行器信息××参考执行器信息××参考执行器信息××参考执行器信息××参考执行器信息××1~2
Enable/Disable不可更改不可更改不可更改不可更改
××××------------生效×××××---××---××
1,方向,2-CCW方向(注)1,停止,2-传感器(注)(注)固定值(注)固定值0~2
设定原点时输出力大小控制器内部固定值原点回归式的速度控制器内部固定值0-无效,1-NO,2-NC
原点回归加速度(注)原点回归动作的加速度和减加速度××
注:
因执行不同而异,请参照执行器操作手册。
②-6DriveTest:
试运行界面。
整个或部分程序的试运行。
TEST模式下有效。
增加一步程序选型下(ADD),可插入一部分程序,亦可插入“Wait”延时或“Jump”跳回起始步命令。
②-7StatusBar:
状态条。
左下角可显示READY,右下角显示Normal/Easy
③Action:
运行命令栏。
下设:
③-1StepData
Download:
程序信息下载至控制器。
Upload:
从控制器内存上传程序信息。
Go:
试运行选定的所有程序。
Stop:
试运行停止。
StepGo:
单步试运行,试运行指定的一步程序。
Hold:
试运行暂停。
③-2TeachingJog:
进入点动界面Direct:
伺服OFF③-3Parameter
Download:
参数设置下载至控制器。
Upload:
从控制器内存上传参数设置。
③-4I/O
Enable:
输出端口可强制输出。
③-5System
Setting:
通信端口设定。
Reset:
重新启动。
5-3-3EasyMode。
简易模式。
简易模式下软件省略部分辅助功能。
使用更快捷。
5、程序编写方法5-1实现定位功能的程序编写方法示例程序:
步1:
执行器运行至距坐标0点100mm的位置;步2:
执行器运行从当前位置向坐标0点方向移动50mm。
注意:
其中PushingForce,TriggerLV,PushingSpeed,MovingForce四项命令在定位功能时无效。
5-2实现力矩输出功能的程序编写方法示例程序:
作动过程:
执行器以100mm/s的速度运行至绝对坐标10mm位置(推力输出起始位置),以5mm/s的速度继续向前执行推力输出,推力大小为执行器额定推力的50%,推力输出的终止位置为position+inposition=10+10=20mm。
若在10~20mm的区间内推理达到额定推力的50%,执行器将保持该出力并保持在该位置。
当执行器超出20mm时,推力输出停止。
相关信号状态:
当电机实际输出力矩达到额定力矩40%时,输出信号TriggerLV变为ON,否则为OFF。
当执行器位置位于Area1和Area2之间时,输出信号AREA变为ON,否则为OFF。
当执行器位置位于Position±InPos内时,输出信号INP变为ON,否则为OFF。
注意:
其中MovingForce命令在力矩输出功能时无效。
16
 升级会员
升级会员 