BLDC驱动器485通讯的接线方法及配置.docx
《BLDC驱动器485通讯的接线方法及配置.docx》由会员分享,可在线阅读,更多相关《BLDC驱动器485通讯的接线方法及配置.docx(4页珍藏版)》请在冰豆网上搜索。
BLDC驱动器485通讯的接线方法及配置
BLDC驱动器485通讯的接线方法及配置
BLDC驱动器485通讯的接线方法及配置 485通讯的接法和配置 485通讯控制 此用法通过485通讯实现对电机的控制操作。
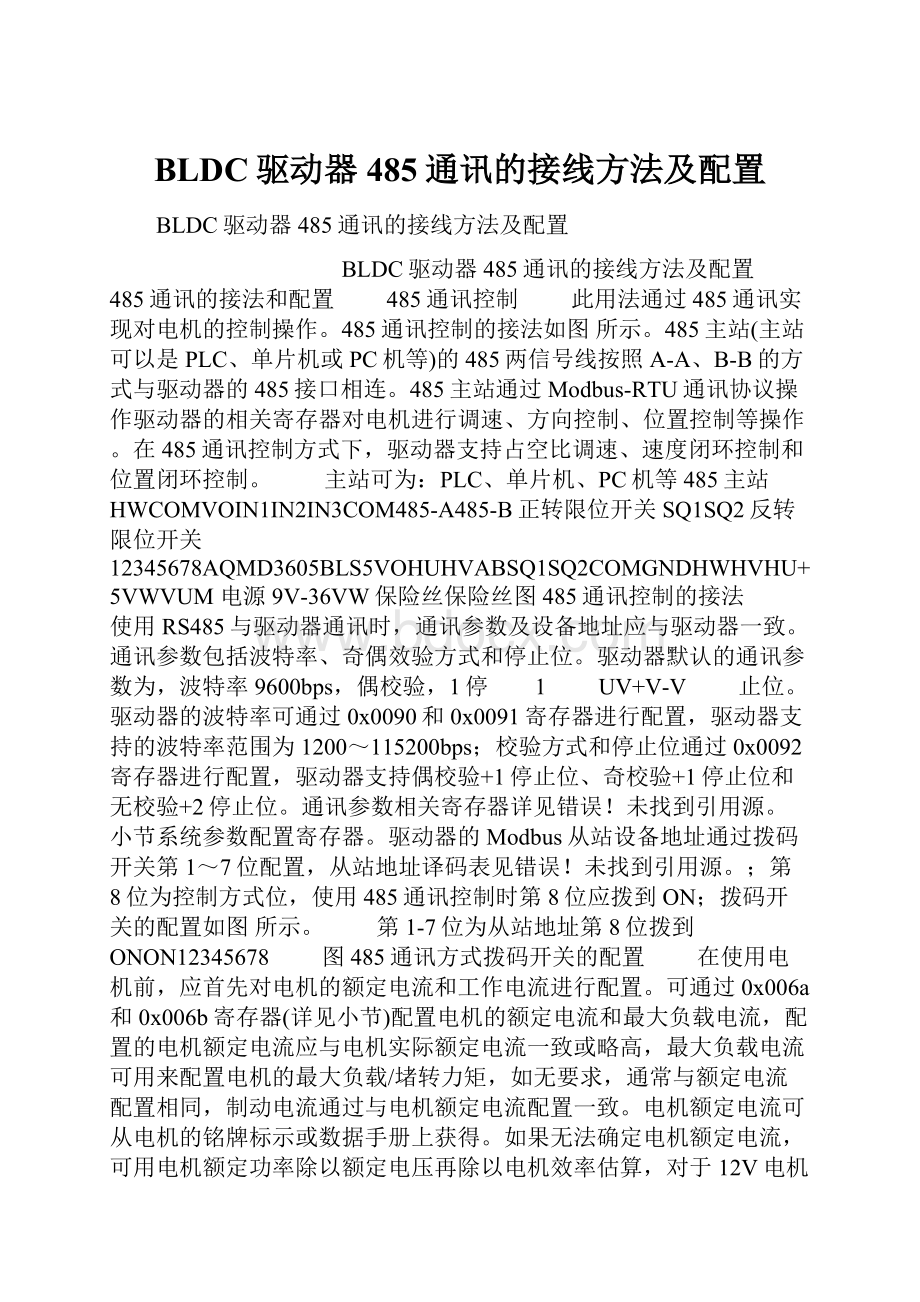
485通讯控制的接法如图所示。
485主站(主站可以是PLC、单片机或PC机等)的485两信号线按照A-A、B-B的方式与驱动器的485接口相连。
485主站通过Modbus-RTU通讯协议操作驱动器的相关寄存器对电机进行调速、方向控制、位置控制等操作。
在485通讯控制方式下,驱动器支持占空比调速、速度闭环控制和位置闭环控制。
主站可为:
PLC、单片机、PC机等485主站HWCOMVOIN1IN2IN3COM485-A485-B正转限位开关SQ1SQ2反转限位开关12345678AQMD3605BLS5VOHUHVABSQ1SQ2COMGNDHWHVHU+5VWVUM电源9V-36VW保险丝保险丝图485通讯控制的接法 使用RS485与驱动器通讯时,通讯参数及设备地址应与驱动器一致。
通讯参数包括波特率、奇偶效验方式和停止位。
驱动器默认的通讯参数为,波特率9600bps,偶校验,1停 1 UV+V-V 止位。
驱动器的波特率可通过0x0090和0x0091寄存器进行配置,驱动器支持的波特率范围为1200~115200bps;校验方式和停止位通过0x0092寄存器进行配置,驱动器支持偶校验+1停止位、奇校验+1停止位和无校验+2停止位。
通讯参数相关寄存器详见错误!
未找到引用源。
小节系统参数配置寄存器。
驱动器的Modbus从站设备地址通过拨码开关第1~7位配置,从站地址译码表见错误!
未找到引用源。
;第8位为控制方式位,使用485通讯控制时第8位应拨到ON;拨码开关的配置如图所示。
第1-7位为从站地址第8位拨到ONON12345678 图485通讯方式拨码开关的配置 在使用电机前,应首先对电机的额定电流和工作电流进行配置。
可通过0x006a和0x006b寄存器(详见小节)配置电机的额定电流和最大负载电流,配置的电机额定电流应与电机实际额定电流一致或略高,最大负载电流可用来配置电机的最大负载/堵转力矩,如无要求,通常与额定电流配置相同,制动电流通过与电机额定电流配置一致。
电机额定电流可从电机的铭牌标示或数据手册上获得。
如果无法确定电机额定电流,可用电机额定功率除以额定电压再除以电机效率估算,对于12V电机,效率可取50%,对于24V及以上电压电机,效率可取70%。
对于初次使用的电机,或电机相线或霍号信号线接线顺序调换,应先进行电机学习。
如何对电机进行学习详见错误!
未找到引用源。
小节。
占空比调速方式下PWM的上升、下降缓冲时间及速度闭环和位置闭环方式下的加减速加速度可通过0x0050~0x0053寄存器(详见小节速度控制存器的描述)临时单独改变;而上电时默认的占空比调速方式下PWM的上升、下降缓冲时间及速度闭环和位置闭环方式下的加减速加速度,以及最大加减速加速度和最大换向频率通过0x0060~0x0067寄存器(详见小节电机控制参数配置寄存器的描述)进行配置。
通过写0x0042寄存器设定输出占空比进行占空比调速;通过写0x0043寄存器设定电机转动的换向频率(对应转速)进行闭环调速;通过0x0044设定位置控制的换向频率(对应转速),0x0045寄存器设定位置控制方式为绝对位置还是相对位置,0x0046和0x0047两个寄存器写入四字节整型的目标位置数值来进行位置闭环控制;通过0x0040寄存器对电机进行制动操作。
占空比调速、闭环调速、位置控制三种调速方式间可直接切换,写各调速方式对应的输出量寄存器(如0x0042、0x0043、0x0047寄存器等)即可切换为相应的调速方式。
对于位置控制调速方式,可以只操作0x0046和0x0047寄存器或在对0x0046寄存器单次写0后只操作0x0047寄存器来进行位置控制。
0x0040~0x0047寄存器的描述详见小节。
闭环调速的算法可通过0x0070寄存器配置为速度闭环控制或时间-位置闭环控制。
前者具有超调量小及在高速时调速平稳的特点,但在低速时调速可能不均匀;后者可实现多驱动器对多个电机转动角度的同步控制,以及在低速时调速也平稳,可满足极低速控制的要求,但在调速过程中有一定超调。
当闭环调速算法为速度闭环控制时,通过0x00c0~0x00c5寄存器配置闭环调速的PID参数;当闭环调速算法为时间-位置闭环控制时,通过0x00c6~0x00cb寄存器配置闭环调速电机转动时的PID参数,通过0x00ba~0x00bf寄存器配置闭环调速电机自锁时的PID参数;当为位置闭环控制,也通过0x00c6~0x00cb寄存器配置位置闭环控制电机转动时的PID参数,0x00ba~0x00bf配置电机自锁时的PID参数。
PID各参数配置过大,可能导致调速或位置控制超调严重甚至出现震荡,PID各参数配置过小可能导致调节缓慢,跟随性差,应合理 2 配置PID参数以使调节效果最佳。
PID参数配置相关寄存器详见的介绍。
通过0x0080~0x0099寄存器(详见小节系统参数配置寄存器的描述)可配置485通讯控制方式下限位开关触发极性、通讯参数、通讯中断保护时间和堵转停止时间等。
我们通过0x0095寄存器设置通讯中断保护时间,当在设置的时间内没有对驱动器进行通讯访问时,驱动器便会进行制动操作,这样可解决机械装置运动过程中,通讯线路出现故障导致机械装置不受主站控制问题,我们可以将实时状态寄存器(详见错误!
未找到引用源。
小节)作为周期性查询访问的寄存器。
我们通过0x008e寄存器设置堵转停止时间,当电机堵转时电流达到配置的最大负载电流且电机转速为0,当这种状态持续时间达到配置的堵转停止时间后,驱动器将进行制动,堵转停止的状态可通过0x0032寄存器读取,我们可以通过制动或反转操作清除堵转停止标志。
通过0x0020~0x0034寄存器(详见错误!
未找到引用源。
小节实时状态寄存器的描述)我们可读取输出PWM值、电机换向频率、电机相电流、电机转动位置、电机转速等电机相关实时状态值以及各输入信号的实时数值。
通过0x0020寄存器读取PWM输出值,PWM输出值可反映驱动器输出加在电机相线上的电压,相电压约等于电源电压乘以占空比。
通过0x0022寄存器读取电机换向频率,电机换向频率为电机转动时霍尔传感器输出的霍尔信号改变的频率,单位为Hz。
电机相电流为电机U、V、W三相线中电流的平均值,单位为A。
通过0x0024和0x0025寄存器读取电机转动位置为电机朝着某一方向转动的换向次数(或霍尔脉冲数),电机位置控制的预计完成时间可通过0x0026和0x0027寄存器读取,完成状态通过0x0023寄存器读取。
电机转速通过0x0034寄存器读取,电机转速为测量的电机实时转速,单位为RPM,要使读取的电机实时转速与电机真实转速一致,那么应先通过0x0073和0x0074寄存器配置电机极个数和减速比。
485通讯控制方式主要相关寄存器如错误!
未找到引用源。
所示。
表预设速度单键控制方式相关寄存器的配置 寄存器地址0x00400x00420x00430x00440x00450x0046-0x00470x0050寄存器作用电机制动控制设定占空比设定速度闭环控制目标速度设定位置闭环控制行走速度设定位置闭环控制类型设定位置闭环控制目标位置临时设定占空比调速加速缓冲时间0x0051临时设定占空比调速减速缓冲时间0x0052临时设定速度闭环控制、位置闭环控制加速加速 3 0~66635数值乘以为换向频率增大速度,单位为Hz/s0~255数值乘以为输出占比空100.0%减小到0所需时间-214748364821474836470~255数值乘以为输出占比空0增加到%所需时间~0,10:
绝对位置1:
相对位置-32768~32767数值乘以为目标换向频率,单位为Hz0,1,2-1000~1000-32768~32767值描述0:
正常停止1:
紧急制动2:
自停止数值乘以%为目标占空比数值乘以为目标换向频率,单位为Hz 度0x0053临时设定速度闭环控制、位置闭环控制减速加速度0x006a0x006b0x006c0x00700x00710x0072配置电机额定电流配置电机最大负载电流配置电机最大制动电流配置速度闭环控制算法配置位置闭环控制允许误差配置位置闭环控制超调后是否修正0x00730x00740x00200x00210x0022配置电机极个数配置电机减速比PWM输出值实时电机相电流实时电机换向频率0~655350~655350~10000~700-32768~32767设定电机极个数,电机极个数通常为3的倍数数值乘以%为占空比数值乘以为电流值,单位为A。
数值乘以为换向频率,单位为Hz;换向频率除以电机极个数再乘以30为电机转速,单位RPM。
0x00230x0024-0x00250x0026-0x00270x0032位置控制完成状态电机实时位置位置控制预计剩余完成时间电机堵转状态0,1,20:
未堵转1:
正转堵转停止2:
反转堵转停止0x0033错误状态0,1,2,3,40:
无错误1:
尚未学习2:
堵转停止3:
霍尔错误4:
无法达到目标速度0x0034电机实时转速0~65535单位为RPM。
注:
需先通过0x0073和0x0074寄存器配置正确的电机极个数和减速比,读取的转速才正确。
4 -214748364821474836470~4294967295单位为ms~0,10:
未完成1:
完成0,10:
不进行修正1:
进行修正0~655350,10:
速度闭环控制1:
时间-位置闭环控制0~300数值乘以为电流值,单位为A。
0~700数值乘以为电流值,单位为A。
0~700数值乘以为电流值,单位为A。
0~66635数值乘以为换向频率减小速度,单位为Hz/s 更多寄存器的描述详见错误!
未找到引用源。
小节。
485多站点通讯控制 此用法使用一个485主站(主站可以是PLC、单片机或PC机等)通过485通讯方式操作多台驱动器,从而实现对多个电机的分别控制。
拓扑图如图所示。
485多站点通讯的接法见错误!
未找到引用源。
小节。
单片机.PLC或PC机等485总线电机驱动器1电机驱动器2电机驱动器3电机驱动器4电机驱动器5电机驱动器nMMMMMM电机1电机2电机3电机4电机5电机6 图485多站点通讯控制拓扑图 5
 升级会员
升级会员 