整理安徽省机器人比赛规程.docx
《整理安徽省机器人比赛规程.docx》由会员分享,可在线阅读,更多相关《整理安徽省机器人比赛规程.docx(10页珍藏版)》请在冰豆网上搜索。
整理安徽省机器人比赛规程
2013年安徽省高等职业院校技能大赛
机器人技术应用项目竞赛规程
一、竞赛项目名称
机器人技术应用
主题:
智能配送装配
赛项简介:
模拟智慧工厂的自动化装配,根据比赛任务要求设计制作机器人,实现工件的识别、工件的抓取、运输、精确定位和装配功能。
二、竞赛方式
竞赛采取团队比赛方式,每个参赛队以学校为单位,每队由领队1名,指导教师2名,竞赛选手3名组成,选手须为同校2013年3月1日前在籍学生,性别和年级不限,其中选定队长1名。
每个参赛院校最多派出2个队参加比赛,且每队机器人的上部机构不能完全相同。
竞赛时间为15分钟。
比赛为任务赛,各队机器人在规定时间内完成规定任务,根据最终得分确定比赛名次。
三、竞赛内容
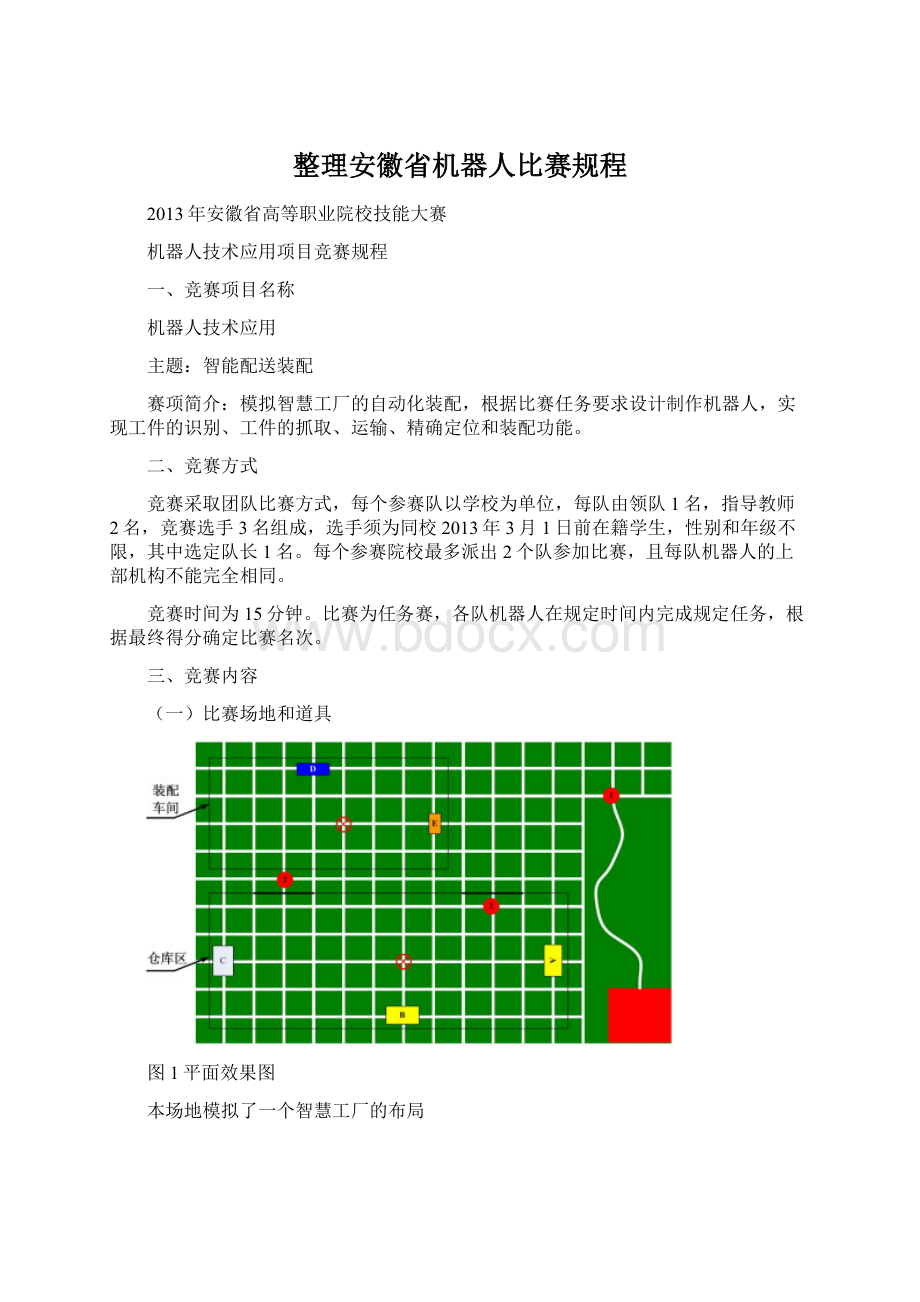
(一)比赛场地和道具
图1平面效果图
本场地模拟了一个智慧工厂的布局
尺寸:
大小为6米*8米。
其中外围挡板高10cm,材质为多层板,上面贴有25mm-30mm宽的白色引导条。
地板的材质和制作方法与2012年全国职业技能大赛高职比赛使用的地板基本相同。
机器人出发区:
机器人出发区是机器人正式启动前所停泊的区域,位于场地的右下角,尺寸大小为1000mm*1000mm,颜色为红色,如图1所示。
仓库区:
仓库区是存放工件的区域,其大小如图1所示,二个仓库门的位置如图1中粗实线所示,机器人进出仓库区必须经过仓库门。
在仓库区中有A、B、C三个单层货架,A、B为轮轴存放架,C为轴承外圈存放架,每个货架上均存放3个工件。
装配车间:
装配车间是零件暂存和装配的区域,其位置大小如图1所示,机器人未携带工件不得进入此区域。
在该区内有一个装配台D和一个零件暂存货架E,装配台D用于装配轴承外圈和轮轴,装配台上有3个装配工位,暂存货架E用于暂存轮轴。
关键点和障碍点:
关键点是机器人在场地上必须经过的位置,场地上设有3个关键点,其位置如图1所示(注意:
在实际场地上并没有红点)。
其中关键点1表示机器人出了出发区,关键点2表示机器人进入仓库区,关键点3表示机器人出了仓库区。
障碍点表示该处有障碍机器人不能从此处通过,场地上设有2个障碍点,其位置在参赛队适应场地时现场公布。
比赛道具:
共有2种工件:
轴承外圈和轮轴。
工件的材料为有机玻璃和尼龙。
轴承外圈如图2所示,红蓝色各3个。
上端外径为Φ44mm,内径为32mm,高度为31mm的圆柱,上端圆柱的底部有一个直径为Φ120mm厚度为10mm有机玻璃板,板面上有4个Φ10mm的圆孔和4个月牙孔,该月牙孔的半径为25mm。
中端为外径为Φ80mm,内径为Φ68mm,高度为59mm的圆柱。
下端为外径为Φ44mm,内径为Φ32mm,高度为31mm的圆柱。
整个比赛场地共有红色轴承外圈和蓝色轴承外圈各3个。
在每个轴承外圈的中端圆柱上均贴有RFID标签,RFID标签符合ISO18000-6C标准,内储存该工件的编号及工件名称、颜色、重量、基本尺寸等信息。
图2轴承外圈
轮轴工件如图3所示,上端外径为Φ30mm,内径为Φ18mm,高度为31mm的圆柱。
下端为外径为Φ54mm,内径为Φ48mm,高度为59mm的圆柱。
整个比赛场地共有红色轮轴和蓝色轮轴各3个。
在每个轮轴的下端圆柱上均贴有RFID标签,RFID标签符合ISO18000-6C标准,内储存该工件的编号及工件名称、颜色、重量、基本尺寸等信息。
图3轮轴
货架A和B:
货架A和B用于存放轮轴工件,由台面、支撑架和定位柱三部分组成,如图4所示。
台面是长为436mm,宽为200mm,厚度10mm的有机玻璃板,台面上用不干胶贴纸标示出三个存放位,存放位为外径为Φ54mm的圆,三个存放位圆心之间的距离均为145mm。
支撑架为2020工业铝材搭建,长436mm,宽为200mm,高度为300mm。
定位柱为高度为120mm,直径为Φ60mm的有机玻璃管。
每个货架上有3个存放位,比赛时每个货架上存放3个同一颜色的轮轴工件。
a.面板尺寸b.货架立体效果图
图4轮轴工件存放台
货架C:
货架C用于存放轴承外圈工件,由台面、支撑架和定位柱三部分组成,如图5所示。
台面是长为436mm,宽为200mm,厚度10mm的有机玻璃板,台面有三个存放位,存放位为直径Φ46mm的圆孔,三个存放位孔心之间的距离均为145mm。
支撑架为2020工业铝材搭建,长436mm,宽为200mm,高度为380mm。
定位柱为高度为120mm,直径为Φ60mm的有机玻璃管。
每个货架上有3个存放位,比赛时每个货架上存放3个同一颜色的轴承外圈工件。
a.面板尺寸b.工件放置效果图
图5轴承外圈存放台
装配台D:
装配台D用于装配轴承外圈和轮轴,由台面、支撑架和定位柱三部分组成,装配台上有3个装配工位。
台面尺寸与货架C相同,支撑架为2020工业铝材搭建,长436mm,宽为200mm,高度为350mm。
定位柱为高度为120mm,直径为Φ60mm的有机玻璃管,效果图可参照图5。
零件暂存货架E:
暂存货架E用于存放机器人从仓库搬运来的轮轴工件,其各部分尺寸与货架A、B完全相同。
几点说明:
1、本规程给出的道具图片均为3D效果图,与实际场地上的道具可能存在一定差别,尺寸上的加工误差在±5%以内。
各参赛队可以根据道具尺寸自行加工。
2、工件上RFID标签内的数据为4字节,16进制编码,数据格式及字段意义如下:
工件编号
工件类型
重量
尺寸
01~1E
0A:
红色轴承外圈
0B:
红色轮轴
0C:
蓝色轴承外圈
0D:
蓝色轮轴
工件的质量,单位为g
工件尺寸,单位为mm
如某工件的RFID标签内数据为:
060A9650,则表示该工件的编号为06,类型是红色轴承外圈,质量为150g,外径为80mm。
(二)比赛任务
1、比赛机器人
大赛的机器人设备由机器人平台、机器人上部机构组成,其中机器人需要参赛队自行开发。
每个参赛队使用1台自动运行的机器人,每队机器人总重不超过50公斤。
(1)机器人平台:
推荐使用国赛指定的由北京中科远洋科技有限公司研发的A200型机器人平台,参加过2011年和2012年全国技能大赛机器人项目的学校可以继续使用原来的机器人平台。
各参赛院校也可以根据比赛任务自行设计机器人平台。
(2)机器人上部机构:
由参赛队根据比赛任务自行设计制作。
(3)RFID读写模块:
各参赛队使用的RFID读写模块须符合ISO 18000-6C标准。
推荐使用国赛指定的由北京中科远洋科技有限公司研发的ZKR6806M型嵌入式超高频读写模块,各参赛队也可根据上述标准自行采购符合规范的超高频RFID读写模块。
2、任务要求
每队比赛开始前,由裁判随机在A、B两个货架上放置两种不同颜色的轮轴工件各3个,每个货架上工件的颜色相同。
在C货架上放置3个相同颜色的轴承外圈工件,工件颜色由裁判随机指定。
本次比赛的任务有2个:
任务一:
机器人启动后通过仓库门进入仓库区,从货架上抓取同种颜色的轴承外圈工件和轮轴工件各3个,到装配车间的装配台D完成三个轴承成品的装配;
任务二:
机器人将仓库区中A、B货架上存放的与C货架中轴承外圈工件颜色不同的3个轮轴工件搬运至装配车间的零件暂存货架E上。
几点说明:
(1)任务一与任务二没有先后顺序要求;
(2)机器人未携带工件不准进入装配车间区域;
(3)进出仓库区必须经过仓库门;
(4)轴承成品的装配顺序是:
先在装配台上装配轴承外圈,然后在轴承外圈中装入轮轴,装配过程及装配要求如图6所示。
图6轴承成品装配过程立体效果图
3、机器人要求:
(1)每参赛队的机器人在启动前不预装任何工件,机器人由队员启动后必须是自主运动,不能通过任何有线、无线通信遥控机器人。
(2)在裁判下达启动机器人指令前启动机器人将被视做误启动,误启动2次以上取消该队参赛资格。
在裁判下达启动机器人指令后,机器人必须在50秒以内启动完毕,超过50秒后,没有启动的机器人再次启动必须申请重试。
(3)机器人在出发区放置完毕后,操作机器人的队员必须立即退出赛地,站在木质围栏外。
(4)一旦机器人启动,参赛队员不得接触机器人。
(5)启动前,机器人在启动区内必须纳入1000mm长、1000mm宽、1500mm高的空间范围,机器人所有部件在水平投影的任何方向上都不能超出启动区。
(6)启动后,自动机器人的尺寸和形状可以改变,但高度限制在2000mm以内,任意时刻瞬时宽度不能超过1500mm。
(在水平投影的任何方向上测量都应符合此要求)。
(7)比赛一旦开始,自动机器人不允许分离。
(8)机器人在场上发生故障时,为保护机器人,参赛队员可以向裁判申请关闭机器人电源,但是关闭电源后,机器人在场上的位置不允许改变。
4、机器人的重试
(1)比赛时每队允许3次“重试”。
(2)“重试”的申请被裁判允许后,参赛队员必须把机器人搬回到机器人启动区,并尽快启动,允许重试的机器人必须符合上述机器人的要求。
(3)“重试”时,机器人的任何部件均不能更换,机器人的能源也不能补充或增加,机器人已经抓取的工件可以继续放在机器人上。
(4)当“重试”违反规则时,由裁判做出裁决,包括“重试”是否有效。
(5)重试的时间是30秒钟,从队员入场接触到机器人开始计时,30秒内没有启动的机器人将被留在启动区。
5、能源要求
(1)比赛期间各队应为自己的所有机器人准备能源。
(2)允许使用的电源电压不得超过24VDC。
(3)压缩空气的压强应小于0.8MPa,每台机器人所用气瓶的总容积不应超过3L。
(4)不允许使用组委会认为危险和不适当的能源。
四、评分标准
参赛队的成绩由整体设计分(占总分20%)、职业素养分(占总分5%)和任务得分(占总分75%)组成。
(一)整体设计分评分方法
1、整体设计分满分为20分。
2、比赛裁判按照参赛队所提交的机器人设计文档,根据机械图纸、电路图纸、零件的加工装、装配以及程序代码从自创性、先进性、合理性、稳定性和经济环保、可拓展性等因素,进行综合评定。
(二)职业素养分评分方法
1、职业素养分满分为5分。
2、职业素养分由该场比赛裁判按照参赛队以下方面表现进行评
定:
(1)公平竞赛,遵守赛场纪律。
(2)遵守操作规程,安全、文明参赛。
(3)冷静、高效,分工合作,一丝不苟。
(4)着装规范整洁,爱护设备,保持竞赛环境清洁有序。
(5)抗工作环境干扰能力强、善于与裁判沟通。
(三)任务得分
1、任务得分满分为75分。
2、机器人经过一个关键点得3分,机器人未携带工件经过关键3,该关键点不得分,每个关键点不重复计分。
3、机器人从A、B货架上每抓取一个轮轴工件并放置在机器人上得3分/工件。
若工件在抓取过程中与货架脱离接触但未放置到机器人上,得1分/工件。
4、机器人从C货架上每抓取一个轴承外圈工件并放置在机器人上得5分/工件。
若工件在抓取过程中与货架脱离接触但未放置到机器人上,得1分/工件。
5、机器人进入装配区,按照正确顺序、正确的颜色和正确的位置将工件放置在装配的装配工位上每完成一个成品的装配,得4分/工件;若工件没有正确安装到装配台上的装配工位,但工件仍在装配台面上,且与机器人脱离接触,得1分/工件。
6、机器人把正确颜色的轮轴工件放置在暂存货架E上,得3分/工件,若颜色不正确得1分/工件。
(四)违规扣分
选手有下列情形,需从比赛成绩中扣分:
1、在完成工作任务的过程中,因操作不当影响自己或他人完成工作任务,扣5分。
2)按发布权限分。
环境标准按发布权限可分为国家环境标准、地方环境标准和行业环境标准。
2、损坏赛场提供的设备,污染赛场环境,工具遗忘在赛场等不符合职业规范的行为,视情节扣5-10分。
3、机器人未携带工件进入装配车间扣2分/次。
2.建设项目环境影响评价文件的报批时限4、机器人触碰障碍点或水平投影方向覆盖障碍点本次任务不得分,但选手可申请重试。
发现规划存在重大环境问题的,审查时应当提出不予通过环境影响报告书的意见;(五)成绩评定方式
(三)规划环境影响评价的公众参与比赛成绩按照总得分从高到底排列,总得分按如下公式计算:
安全评价的基本原则是具备国家规定资质的安全评价机构科学、公正和合法地自主开展安全评价。
总得分=整体设计分+职业素养分+任务得分-违规扣分
1.法律若总得分相同,则首先按照任务得分排名,得分高的队伍排名在前;若任务得分相同,则按照完成任务的时间排名,用时少的队伍排名在前;若用时相同,则由裁判组综合评定。
(5)污染防止措施能否达到要求。
五、奖项设置
(3)建设项目对环境可能造成影响的分析、预测和评估。
按照皖教秘高〔2013〕9号“关于印发2013年安徽省职业院校技能大赛(高职组)方案的通知”中的奖励办法设定一、二、三等奖和优秀奖并颁发相应的证书。
(一)建设项目环境影响评价的分类管理六、安全
一、环境影响评价的基础各参赛队设计的机器人均不能对操作者、裁判、比赛工作人员、观众和比赛场地造成伤害,否则取消参赛资格。
为了保证安全,机器人电源电压不超过24V,如果使用激光束,必须低于2级激光,并以不伤害任何操作者、裁判、比赛工作人员、观众和比赛场地的方式使用,否则取消参赛资格。
七、申诉与仲裁
(一)申诉
1.参赛队对不符合竞赛规定的设备、工具、软件,有失公正的评判、奖励,以及对工作人员的违规行为等,均可提出申诉。
2.申诉应在竞赛结束后2小时内提出,超过时效不予受理。
申诉时,应按照规定的程序由参赛队领队向赛项仲裁工作组递交书面申诉报告。
报告应对申诉事件的现象、发生的时间、涉及到的人员、申诉依据与理由等进行充分、实事求是的叙述。
事实依据不充分、仅凭主观臆断的申诉将不予受理。
申诉报告须有申诉的参赛选手、领队签名。
3.赛项仲裁工作组收到申诉报告后,应根据申诉事由进行审查,6小时内书面通知申诉方,告知申诉处理结果。
4.申诉人不得采取过激行为刁难、攻击工作人员,否则视为放弃申诉。
(二)仲裁
赛项设仲裁工作组接受由代表队领队提出的对裁判结果等方面问题的申诉。
赛项仲裁工作组在接到申诉后的2小时内组织复议,并及时反馈复议结果。
仲裁工作组的仲裁结果为最终结果。
。
 升级会员
升级会员 