电磁泵的结构和原理.docx
《电磁泵的结构和原理.docx》由会员分享,可在线阅读,更多相关《电磁泵的结构和原理.docx(45页珍藏版)》请在冰豆网上搜索。
电磁泵的结构和原理
电磁泵的结构和原理
电磁泵SolenoidPump,是一种电磁铁驱动的柱塞泵.是一种高压微型泵。
特点有:
结构紧凑,输出压力高,无泄漏,体积小,动态调节特性好,输出流量较小等
电磁泵的电源是:
1.交流过滤后的半波.或2.其它单向方波电流.
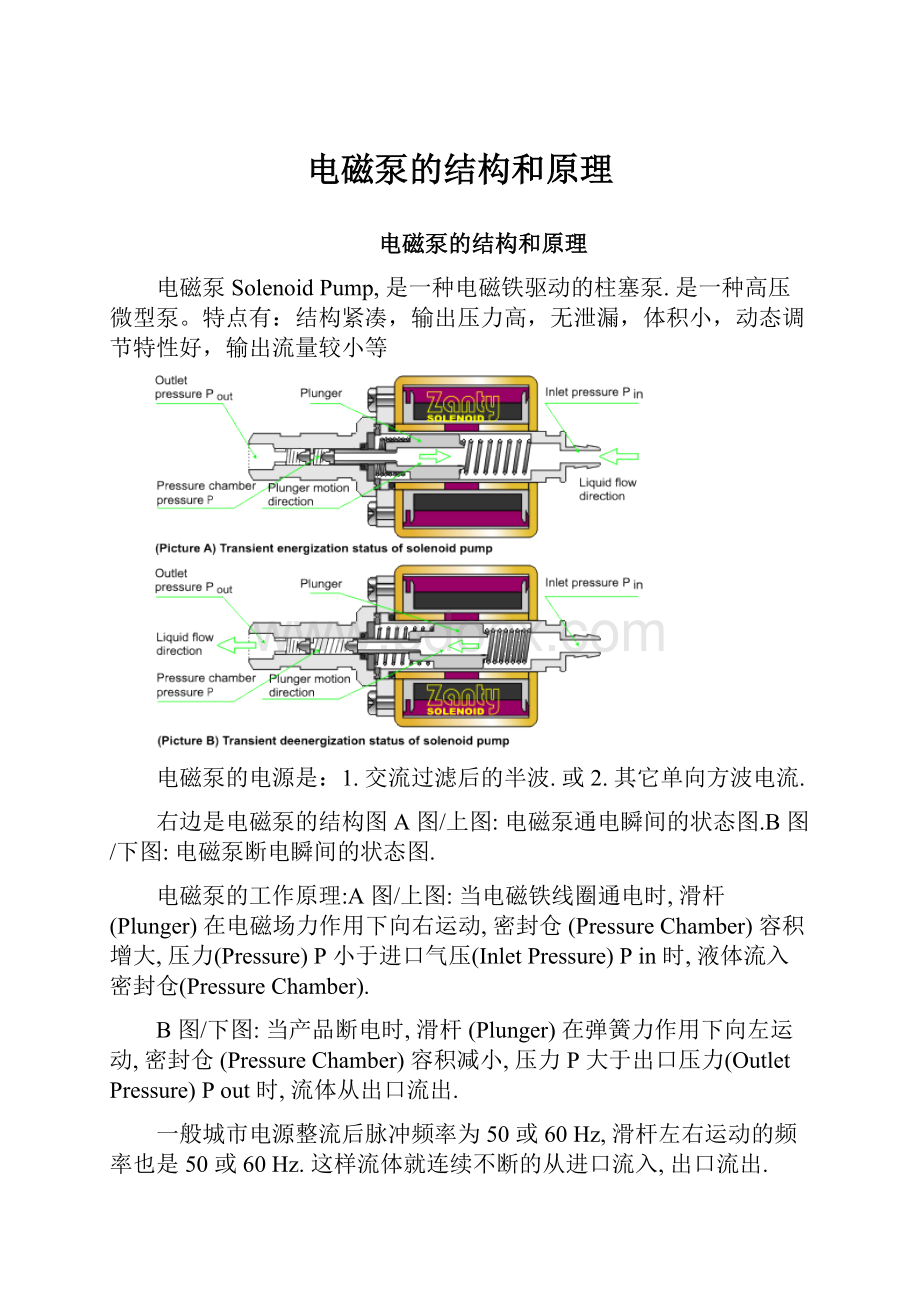
右边是电磁泵的结构图A图/上图:
电磁泵通电瞬间的状态图.B图/下图:
电磁泵断电瞬间的状态图.
电磁泵的工作原理:
A图/上图:
当电磁铁线圈通电时,滑杆(Plunger)在电磁场力作用下向右运动,密封仓(PressureChamber)容积增大,压力(Pressure)P小于进口气压(InletPressure)Pin时,液体流入密封仓(PressureChamber).
B图/下图:
当产品断电时,滑杆(Plunger)在弹簧力作用下向左运动,密封仓(PressureChamber)容积减小,压力P大于出口压力(OutletPressure)Pout时,流体从出口流出.
一般城市电源整流后脉冲频率为50或60Hz,滑杆左右运动的频率也是50或60Hz.这样流体就连续不断的从进口流入,出口流出.
电磁泵(Solenoidpump),亦称为振动柱塞泵(OscillatingorVibratingpistonpump),是一种将电磁动力和泵体直接结合为一体的高压微型泵,不需要驱动轴,通电后线圈产生磁力,推动柱塞运动,输送液体。
电磁泵是一种特点突出的泵类产品,具有结构紧凑,易于布置在狭小空间,输出压力高,无泄漏,体积小,价格相对低廉,动态调节特性好,输出流量较小等特点。
电磁泵由于形体小巧虽然便于安装,但也决定了它的压力和流量不会很高;以往主要应用在饮料冲饮机、蒸汽清洗机、冲牙器、喷雾加湿器、过滤器增压机、计量泵、地毯清洗机等需要小流量清水的场合,以民用设备为主。
德国巴沃瑞Bavaria电磁泵带来了科技突破。
以往的电磁泵通常只能输送低压小流量的水;巴沃瑞不但可以输送水,还可以输送轻质油,而且压力、流量范围更广;更重要的是,巴沃瑞的寿命提高到20000小时,并且可以忍受更长时间的干转。
因此,巴沃瑞电磁泵可以应用到更多的工业机械供油场合,结合该泵体积、质量轻巧的特点,扩充了电磁泵的应用空间。
流量(Max):
400l/h
输出压力(Max):
25bar
工作介质:
水;轻质油;带腐蚀性液体。
工作电压:
AC24-42-110-230V50,60HZ;DC12-24V
寿命:
20000h
应用:
作为计量泵使用--通过改变电压或者频率来控制流量。
作为润滑泵使用—特别适合主轴、导轨等需要微量润滑且空间狭小的场合。
作为燃油输送泵使用—可以作为柴油机燃油系统供油泵。
需要微量循环液、冷却液的场合
反渗透RO纯水机、超滤装置、咖啡机、软饮料苏达循环系统、各类冷却系统、恒温循环器、恒温槽、供油润滑系统等;大型焊机的冷却系统、激光冷却系统、真空系统的冷却循环装置、实验室恒温系统、大型喷绘机、肾透析机、舞台烟雾机、太阳能系统、医疗实验装置、食品加工物流输送等;空调排水系统、意式咖啡机、烟雾发生器、珠宝清洗机。
我们通过电磁泵原理的阐述,来说明磁场对通电液体的作用。
在原子反应堆中用来进行热交换的液态金属(钠),专用医疗机中的血液,都是靠电磁泵来驱动的。
图2-1是电磁泵的工作原理图。
矩形截面积为S=a×b的导管中是某种导电液体,磁感应强度为B的匀强磁场,沿垂直于导管的方向通过导管中的流体,磁场的宽度为l,当有图示方向的电流I通过导电流体时,则流体便会被驱动。
下面我们要说明通电流体被磁场驱动的原理,并计算驱动力和驱动力对流体的压强。
取图2-1的一个剖面,这个剖面图是逆着匀强磁场的方向看去的,剖面与磁场方向垂直,磁场垂直于剖面指向读者;电流I的方向向上,即正离子的方向向上,负离子的方向向下;根据左手定则,正负离子均受磁场力的作用,磁场力的方向向右。
导电液体实际上都是等离子体,即正负离子数相等,正负离子的带电量也相等。
若单位体积内导电粒子数为n,每个导电粒子的带电量为q,则每个带电粒子(即离子)所受的磁场力为:
f=Bqv0
式中v0是带电粒子在电流方向上的定向运动的速率,根据导电理论可知:
I=nblv0q
式中bl=S,是电流I的横截面积,根据此式可得v0=I/nblq,则f=BI/nbl.导电流体中受到磁场作用力的带电粒子的总数为N=nabl,则磁场对导电流体的驱动力,即合力为:
单位面积上所受的力为压强(p),所以磁场驱动流体的压强为:
电磁泵的结构和原理
默认分类2008-04-0414:
30:
12阅读58评论0 字号:
大中小 订阅
电磁泵SolenoidPump,是一种电磁铁驱动的柱塞泵.是一种高压微型泵。
特点有:
结构紧凑,输出压力高,无泄漏,体积小,动态调节特性好,输出流量较小等
电磁泵的电源是:
1.交流过滤后的半波.或
2.其它单向方波电流.
右边是电磁泵的结构图
A图/上图:
电磁泵通电瞬间的状态图.
B图/下图:
电磁泵断电瞬间的状态图.
电磁泵的工作原理:
A图/上图:
当电磁铁线圈通电时,滑杆(Plunger)在电磁场力作用下向右运动,密封仓(PressureChamber)容积增大,压力(Pressure)P小于进口气压(InletPressure)Pin时,液体流入密封仓(PressureChamber).
B图/下图:
当产品断电时,滑杆(Plunger)在弹簧力作用下向左运动,密封仓(PressureChamber)容积减小,压力P大于出口压力(OutletPressure)Pout时,流体从出口流出.
一般城市电源整流后脉冲频率为50或60Hz,滑杆左右运动的频率也是50或60Hz.这样流体就连续不断的从进口流入,出口流出.
图中英文对应中文意思:
OutletPressure:
Pout=出口压力Pout
Plunger=滑杆
InletPressurePin=进口压力Pin
PressureChamberPressureP=压力仓压力P
PlungerMotionDirection=滑杆运动方向
LiquidFlowDirection=液体流动方向
电磁推进技术
默认分类2008-04-0415:
01:
33阅读113评论0 字号:
大中小 订阅
磁流体推进简介
磁流体推进的基本原理是基于物理学中著名的弗来明定律,即通电的海水在与其电场垂直的磁场中,受到电磁力-洛伦兹力作用而运动,其反作用力推动船舶前进。
这种推进方式无旋转机械传动,无螺旋桨和叶轮,消除了与旋转机械有关的噪声部件,因此,将大大降低推进器噪声,真正实现船舶的安静航行。
我国从1996年由中科院电工所开始进行超导电磁流体技术的研究,已经建成了拥有5T螺管超导磁体的电磁流体推进实验室,成功研制了螺旋式电磁流体推进实验船(HEMS-1),并获中科院2000年度科技进步二等奖。
1999年中科院电工所和日本神户商船大学利用日本国立金属研究所高场强开放实验室的条件,进行了高磁场条件下(14特斯拉)磁流体推进器性能试验研究。
试验结果表明:
推进器最高电效率为40%,最大电磁力密度为20000N/m3,其技术性能指标比“大和一号”提高了近10倍,是目前世界上磁流体推进技术在试验研究中所达到的最高参数。
在这次合作试验中,中方承担了核心部分——磁流体推进器的研制。
这次试验的成功,确立了我国在该领域的国际先进地位。
同时,我们还拥有《平行螺管超导磁体组合式磁流体海水推进器》和《一种超导磁流体船舶推进器》等多项相关专利。
图1表示磁流体推进器的基本原理,由于海水导电,给推进器管道中的海水施加一个磁场和一个与磁场正交的电场,管道中的海水就会受到一个与电场和磁
图1:
磁流体推进器的基本原理
场垂直的电磁力(洛伦兹力)的作用。
当这个力的方向沿着船尾方向时,海水将向船尾方向运动,同时,海水的运动给船体一个反作用力,使船体向前运动。
本项研究起初只应用于海洋船舶推进,现在推广到了导电液体,极大拓宽了研究应用范围。
海洋浮油回收船
众所周知,海面经常发生油品泄漏事件,对环境造成了极大的影响。
现在对于原油中的重油一般采用先用吸附物收集,然后再用挤、刮等方法处理。
而原油中的轻质油则只能采用在海面抛撒分散剂,使其沉入海底的的方法。
这些方法都不能快速有效地解决问题,而且还有可能带来二次污染。
针对目前难以处理的轻质油和化工原料的海洋油污染,中科院电工研究所点磁推进组提出了磁流体海洋以油回收新技术。
该技术基于电磁流体推进的基本原理以及油和海水之间电物理特性的差异,具有操作简单,回收彻底,回收油品质高,对海洋环境影响小等特点。
根据海洋以油的分布状态和特点,可分为分层流和混合流两种海洋溢油分离回收方式。
从2002年开始,磁推进组与企业和日本神户大学合作,开展了该技术的研究。
建立了相应的海洋溢油分离回收系统的数学模型,研制了模拟试验装置,进行了试验研究。
2004年,成功研制了油水分层流海洋浮油回收试验船,其分离通道截面为1218平方毫米,磁场强度为0.87T,工作电流为10~13A时,收油量可达65kg/h~70kg/h,回收油含水率小于5%。
2006年与日本神户大学合作,顺利完成了混合流分离回收模拟试验。
试验结果表明:
当磁场强度为10T,工作电流为2A,油珠直径为0.5mm时,分离率可达到99.45%。
磁流体血液泵
磁流体血液泵是一种新型的血液驱动装置。
它基于磁流体推进的基本原理和血液的导电特性。
在该装置中,血液中没有运动的机械部件和周期性的机械变形,因而对血液没有机械积压的破坏作用,降低了血液驱动过程中对血液生化特性的影响。
这种新型血液驱动方式的研究,对人工心脏辅助装置有重要意义。
中科院电工研究所磁推进组于2003年开始交流磁流体血液泵的研究。
建立了交流磁流体推进器的数学模型,对环形通道内部电磁流体动力学特性进行了仿真分析。
模拟试验装置采用魔环结构的四极永磁磁体和环形通道的血动力室。
试验结果表明,当磁场强度为0.85T,磁体转速为3000转/分,通道内的流速约为0.23m/s,流量可达到47.4升/分。
铜包铝线生产工艺流程
默认分类2008-04-0415:
15:
00阅读48评论0 字号:
大中小 订阅
铜包铝线是在铝芯上同心地包覆
铜层并使铜铝界面形成金属结合的双
金属复合导线,它是铜导线的更新换
代产品,二十一世纪的新复合材料。
具有合理利用自然资源,降低生产成
本,方便工程施工等优点,具有广阔
的发展前景。
工艺流程图:
评论这张
转发至微博
陀螺仪工作原理与应用(陀螺经纬仪JyroStation)
默认分类2008-04-0415:
45:
20阅读6评论0 字号:
大中小 订阅
来源:
译自日本《测量》06年8月号作者:
日本测量仪器工业会更新日期:
2006-9-22阅读次数:
3388
为了求得测量的基准方位和日照时间的方位,必须使用磁针罗盘仪进行天体观测。
然而,磁针罗盘仪的精度有限,在天体观测中还要受到确保通视、天气、场所和时间等观测条件的影响。
为了解决这些问题,可采用利用了力学原理求得真北的陀螺经纬仪。
陀螺经纬仪在隧道测量以及由于不能和已知点通视而无法确定方位、方向角的情况下都能发挥很大的作用。
(图1:
陀螺工作站)
1、陀螺工作站的原理
高速旋转的物体的旋转轴,对于改变其方向的外力作用有趋向于铅直方向的倾向。
而且,旋转物体在横向倾斜时,重力会向增加倾斜的方向作用,而轴则向垂直方向运动,就产生了摇头的运动(岁差运动)。
当陀螺经纬仪的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向旋转力,陀螺的旋转体向水平面内的子午线方向产生岁差运动。
当轴平行于子午线而静止时可加以应用。
2、陀螺工作站的构造
(图4:
陀螺经纬仪的构造0点调整螺丝,吊线,照明灯,陀螺转子、指针、供电用馈线、反射镜、陀螺马达、刻度线、目镜)。
陀螺经纬仪的陀螺装置由陀螺部分和电源部分组成。
此陀螺装置与全站仪结合而成。
陀螺本体在装置内用丝线吊起使旋转轴处于水平。
当陀螺旋转时,由于地球的自转,旋转轴在水平面内以真北为中心产生缓慢的岁差运动。
旋转轴的方向由装置外的目镜可以进行观测,陀螺指针的振动中心方向指向真北。
利用陀螺经纬仪的真北测定方法有“追尾测定”和“时间测定”等。
追尾测定[反转法]
利用全站仪的水平微动螺丝对陀螺经纬仪显示岁差运动的刻度盘进行追尾。
在震动方向反转的点上(此时运动停止)读取水平角。
如此继续测定之,求得其平均震动的中心角。
用此方法进行20分钟的观测可以求得+/-0。
5分的真北方向。
时间测定[通过法]
用追尾测定观测真北方向后,陀螺经纬仪指向了真北方向,其指针由于岁差运动而左右摆动。
用全站仪的水平微动螺丝对指针的摆动进行追尾,当指针通过0点时反复记录水平角,可以提高时间测定的精度,并以+/-20秒的精度求得真北方向。
(图2:
摇头运动)
(图3:
向子午线的岁差运动)
(图5:
指针与刻度盘 刻度线/0点/指针)
3、陀螺全站仪的应用实例
3.1隧道中心线测量
在隧道等挖掘工程中,坑内的中心线测量一般采用难以保证精度的长距离导线。
特别是进行盾构挖掘(shieldtunnel)的情况,从立坑的短基准中心线出发必须有很高的测角精度和移站精度,测量中还要经常进行地面和地下的对应检查,以确保测量的精度。
特别是在密集的城市地区,不可能进行过多的检测作业而遇到困难。
如果使用陀螺经纬仪可以得到绝对高精度的方位基准,而且可减少耗费很高的检测作业(检查点最少),是一种效率很高的中心线测量方法。
(图6:
盾构挖掘的中心线测量 陀螺工作站/真北/检查点/立坑/陀螺工作站)
3.2通视障碍时的方向角获取
当有通视障碍,不能从已知点取得方向角时,可以采用天文测量或陀螺经纬仪测量的方法获取方向角(根据建设省测量规范)。
与天文测量比较,陀螺经纬仪测量的方法有很多优越性:
对天气的依赖少、云的多少无关、无须复杂的天文计算、在现场可以得到任意测线的方向角而容易计算闭合差。
(图7:
通视障碍时的方向角获取 已知点)
3.3日影计算所需的真北测定
在城市或近郊地区对高层建筑有日照或日影条件的高度限制。
在建筑申请时,要附加日影图。
此日影图是指,在冬至的真太阳时的8点到16点为基准,进行为了计算、图面绘制所需要的高精度真北方向测定。
使用陀螺经纬仪测量可以获得不受天气、时间影响的真北测量。
了解陀螺仪
默认分类2008-04-0415:
54:
33阅读9评论0 字号:
大中小 订阅
2007-09-2120:
57:
51|作者:
flora|点击:
470|第1页/共1页<<上一页|下一页>>
你可能并不知道,飞机和宇宙飞船都使用技术含量极低的陀螺仪导航。
阅读本文,发掘陀螺运动背后的秘密!
如果你玩过陀螺玩具,就知道它能表演各种各样有趣的绝技。
陀螺能在细线或手指上保持平衡;能以非常奇妙的方式抵制自转轴运动;但最有趣的陀螺效应还是进动。
这是陀螺仪抵抗重力的表现。
下面的视频用自行车轮充当陀螺仪,展示了进动效应:
最惊人的部分--同时也是陀螺仪最难以置信的事情在于,回转的自行车轮能像下图一样悬在空中:
它是怎么做到的?
这种神秘的效应就是“进动”。
一般情况下,进动的发生过程是:
如果有一个陀螺仪正在旋转,而你施力转动它的自转轴,则陀螺仪反而会围绕与力轴成直角的轴转动,就像这样:
它是怎么做到的?
这种神秘的效应就是“进动”。
一般情况下,进动的发生过程是:
如果有一个陀螺仪正在旋转,而你施力转动它的自转轴,则陀螺仪反而会围绕与力轴成直角的轴转动,就像这样:
在图1中,陀螺仪正围绕自己的轴旋转。
在图2中,施力以转动陀螺仪的自转轴。
在图3中,陀螺仪沿着与输入力垂直的轴对输入力做出反应。
那么,为何会发生进动呢?
陀螺仪可算是非常复杂的物体,因为它们以独特的方式运动,甚至像在抵抗重力。
正是这些特殊属性令其对各个方面都极为重要,包括
自行车和宇宙飞船上的先进导航系统。
一般的飞机要用约十多个陀螺仪,遍布在罗盘和自动驾驶仪等各个地方。
俄罗斯米尔空间站(RussianMirspacestation)曾使用11个陀螺仪保持其方向对准太阳,哈勃太空望远镜也有大量导航陀螺仪。
陀螺效应对溜溜球和飞盘等玩具也至关重要。
在本篇HowStuffWorks文章中,我们将对陀螺仪进行介绍,并了解它们的应用为何如此广泛。
此外,还能看到陀螺仪奇妙运动的成因!
陀螺仪为何会发生这种运动?
自行车轮的轮轴居然能那样悬在空中,看上去简直不可思议。
不过,只要想想在旋转时陀螺仪的不同部位实际上都发生了什么,就会明白这种运动完全正常!
让我们研究一下陀螺仪旋转时的两个小部位--顶端和底端,如图所示:
向轮轴施力时,标示的两点会尝试向指示的方向运动。
如图所示,向轮轴施力时,陀螺仪顶端的部位将试图向左运动,而底端部位则试图向右运动。
如果陀螺仪没有旋转,则车轮会倒下(如前一页的视频所示)。
如果陀螺仪正在旋转,试想一下这两个部位都发生了什么:
牛顿第一运动定律指出,运动中的物体会持续沿直线恒速运动,直到受不平衡力作用。
因此,陀螺仪顶点受施加到轮轴的力的作用,开始向左运动。
根据牛顿第一运动定律,它会继续尝试向左运动,但陀螺仪的旋转又转动了它,如下图所示:
两个点一边转动,一边继续自己的运动。
这种效应就是进动的成因。
陀螺仪的不同部位在同一点受力,但随后又转动到新的位置!
当陀螺仪顶端的部位向一侧转动90度时,就会继续向左运动的惯性。
底端的部位也是如此--向一侧转动90度,并继续向右运动的惯性。
这些力以进动方向转动车轮。
当标示的点继续转动的角度超过90度时,原来的运动就取消了。
于是陀螺仪的轴悬在空中并开始进动。
经过这样一番研究,你就明白进动一点都不神秘,它完全符合物理定律!
进动效应总括起来就是,一旦开始旋转陀螺仪,它的轴就总是试图指往同一方向。
的确,只要将陀螺仪放在一套平衡环中,它就能持续指往同一方向。
这也是陀螺罗经的基本原理。
如果在一个平台上装两个陀螺仪,并让它们的轴互成直角,然后把平台放入一套平衡环中,那么无论平衡环怎样转动,平台都将完全保持稳定。
这是惯性导航系统(inertialnavigationsystems,INS)的基本原理。
在INS中,平衡环轴上的传感器会探测平台的转动。
INS通过这些信号获悉交通工具相对于平台的转动。
如果为平台添加一套有三个敏感加速计的装置,就能准确辨别交通工具驶向何方,及其在所有三个方向的运动变化。
有了此信息,飞机的自动驾驶仪就能让飞机保持航线,火箭的导航系统就能让火箭进入理想轨道!
我做的磁悬浮
默认分类2008-04-0416:
20:
30阅读8评论0 字号:
大中小 订阅
磁悬浮想法由来已久,就是用磁力克服重力让物体悬空,但真正做起来并不容易,主要原因是没有稳定的平衡点。
要达到悬浮,必须是稳定的悬浮。
也就是说,用一个力(或位移)在任何方向上(上下左右前后等)来(小)扰动被悬浮物,都会有一个恢复力,使得外力撤消后重新恢复平衡。
我见过的磁悬浮可以分成有源的和无源的两大类,前者比如反馈式的,用光电、磁电等手段检测到被悬浮物体偏离正常悬浮点后,通过调节电磁铁的电流来使得物体保持在悬浮点附近,因此需要用电。
这样的悬浮从道理上看,与开直升飞机悬停没什么区别。
screen.width*0.7){this.resized=true;this.width=screen.width*0.7;this.style.cursor='hand';this.alt='Clickheretoopennewwindow\nCTRL+Mousewheeltozoomin/out';}"onload="if(this.width>screen.width*0.7){this.resized=true;this.width=screen.width*0.7;this.alt='Clickheretoopennewwindow\nCTRL+Mousewheeltozoomin/out';}">
无源悬浮又分为超导悬浮和普通磁悬浮两类,前者是靠超导体的完全抗磁性来达到的,超导体和磁体之间就像安装了弹簧一样。
简单说就是任何磁铁在超导体附近的移动都会在超导体表面产生电流,而这个感生电流所产生的磁场阻碍磁铁的运动,因此磁铁就与超导体相对静止。
screen.width*0.7){this.resized=true;this.width=screen.width*0.7;this.style.cursor='hand';this.alt='Clickheretoopennewwindow\nCTRL+Mousewheeltozoomin/out';}"onload="if(this.width>screen.width*0.7){this.resized=true;this.width=screen.width*0.7;this.alt='Clickheretoopennewwindow\nCTRL+Mousewheeltozoomin/out';}">
普通磁悬浮又可分成两类,排斥悬浮和吸引悬浮。
排斥悬浮有成品可买到,就是所谓的陀螺悬浮。
其原理是用五块大磁铁(比如四角四块N极向上、中间一块S极向上)在悬浮空间上方产生一个磁场谷(对N极向下的悬浮磁铁周围排斥力强但中间弱),那么只要被悬浮磁铁的极性得到保持,就可以成功悬浮。
但处于自由状态的磁铁会上下反转,把排斥力变成吸引力,结果悬浮就失败。
解决这一问题的办法就是把悬浮磁铁做成陀螺,保证在运转期间极性不反转,这样才能悬浮起来。
这个“玩具”我很早也买过,悬浮需要技巧,陀螺的重量要通过垫片调整到误差在0.1g之内才能悬浮,而且要求底座很平。
screen.width*0.7){this.resized=true;this.width=screen.width*0.7;this.style.cursor='hand';this.alt='Clickheretoopennewwindow\nCTRL+Mousewheeltozoomin/out';}"onload="if(this.width>screen.width*0.7){this.resized=true;this.width=screen.width*0.7;this.alt='Clickheretoopennewwindow\nCTRL+Mousewheeltozoomin/out';}">
以上悬浮要么需要能量,要么需要不会持久保持的条件(超导的低温、陀螺的旋转),因此都不是永久悬浮方案。
最后一种,就是吸引悬浮。
但吸引悬浮中,两块磁铁的吸引力基本上是与距离的平方成反比的,尽管吸力与重力有一个平衡点,但为非稳定平衡。
为了解决这一问题,需要用反磁性物质制造一个局部的稳定空间。
我先给出我的试验过程和结果,过一会儿再讲具体原理,并给出另一个制作实例。
1、花90元买来500克分析纯的铋粒。
实际上用不了这么多,也
 升级会员
升级会员 