陀螺仪原理与惯性导航.docx
《陀螺仪原理与惯性导航.docx》由会员分享,可在线阅读,更多相关《陀螺仪原理与惯性导航.docx(11页珍藏版)》请在冰豆网上搜索。
陀螺仪原理与惯性导航
陀螺仪的原理
陀螺仪简介
绕一个支点高速转动的刚体称为陀螺(top)。
通常所说的陀螺是特指对称陀螺,它是一个质量均匀分布的、具有轴对称形状的刚体,其几何对称轴就是它的自转轴。
由苍蝇后翅(特化为平衡棒)仿生得来。
在一定的初始条件和一定的外在力矩作用下,陀螺会在不停自转的同时,还绕着另一个固定的转轴不停地旋转,这就是陀螺的旋进(precession),又称为回转效应(gyroscopiceffect)。
陀螺旋进是日常生活中常见的现象,许多人小时候都玩过的陀螺就是一例。
陀螺仪的原理
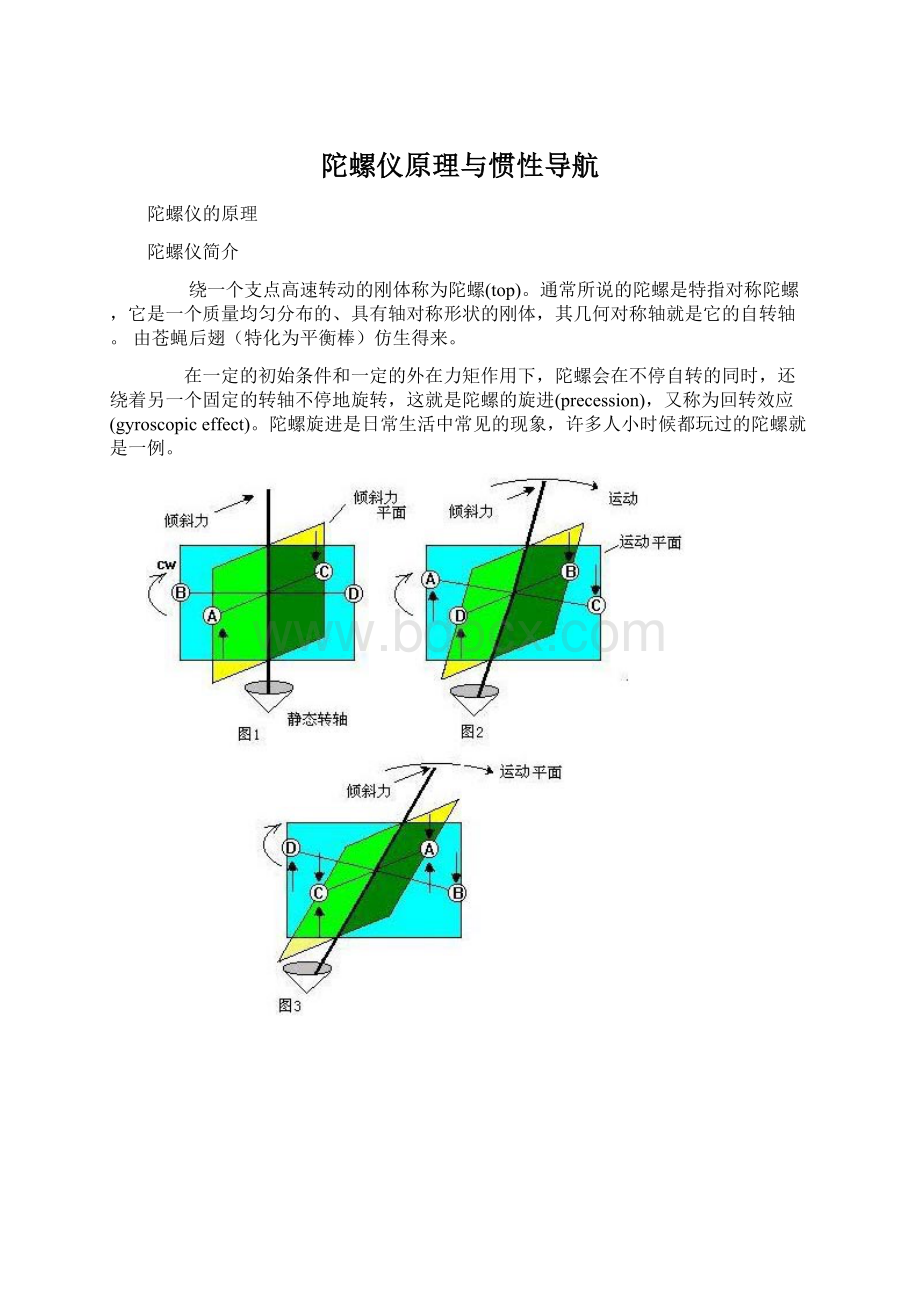
我们不用一个完整的轮框,我们用四个质点ABCD来表示边上的区域,这个边对于用图来解释陀螺仪的工作原理是很重要的。
轴的底部被托住静止但是能够各个方向旋转。
当一个倾斜力作用在顶部的轴上的时候,质点A向上运动,质点C则向下运动,如其中的子图1。
因为陀螺仪是顺时针旋转,在旋转90度角之后,质点A将会到达质点B的位置。
CD两个质点的情况也是一样的。
子图2中质点A当处于如图的90度位置的时候会继续向上运动,质点C也继续向下。
AC质点的组合将导致轴在子图2所示的运动平面内运动。
一个陀螺仪的轴在一个合适的角度上旋转,在这种情况下,如果陀螺仪逆时针旋转,轴将会在运动平面上向左运动。
如果在顺时针的情况中,倾斜力是一个推力而不是拉力的话,运动将会向左发生。
在子图3中,当陀螺仪旋转了另一个90度的时候,质点C在质点A受力之前的位置。
C质点的向下运动现在受到了倾斜力的阻碍并且轴不能在倾斜力平面上运动。
倾斜力推轴的力量越大,当边缘旋转大约180度时,另一侧的边缘推动轴向回运动。
万向节陀螺仪
实际上,轴在这个情况下将会在倾斜力的平面上旋转。
轴之所以会旋转是因为质点AC在向上和向下运动的一些能量用尽导致轴在运动平面内运动。
当质点AC最后旋转到大致上相反的位置上时,倾斜力比向上和向下的阻碍运动的力要大。
陀螺仪运动的特性是它拐弯的时候能够保持单轨设备的直上直下。
比如说,有必要的话,消防汽缸压在一个很重的陀螺仪的轴上,就能保持其稳定。
陀螺仪和万向节结合起来组成的万向节陀螺仪则是实际中最经常应用的。
各模上的陀螺仪
从上面我们可以看到,陀螺仪的关键是轴的不变性。
这样的特性,看起来虽然简单,但能使用在许多不同的应用上。
制导武器就是陀螺仪的最关键应用之一。
在惯性制导中,陀螺仪是控制武器飞行姿态的重要部件,在剧烈变化的环境中,没有精心设计的陀螺仪用来保证稳定性和准确性,再好的控制规律也无法命中目标。
除了制导之外,陀螺仪还能够应用在其他的尖端的科技上。
比如说,著名的哈勃天文望远镜的3个遥感装置中每个都装有一个陀螺仪和一个备份。
3个工作的陀螺仪是保证望远镜指向所必不可少的。
陀螺仪正是因为它的平衡的特性,已经成为了飞行设备中关键的部件,从航模、制导武器、导弹、卫星、天文望远镜,无处没有它的身影,陀螺仪默默的工作保证了这些飞行设备能按照指定的方式去工作。
陀螺仪-功能分类
利用陀螺仪的动力学特性制成的各种仪表或装置,主要有以下几种:
①。
能给出飞行物体转弯角度和航向指示的陀螺装置。
它是三自由度均衡陀螺仪,其底座固连在飞机上,转子轴提供惯性空间的给定方向。
若开始时转子轴水平放置并指向仪表的零方位,则当飞机绕铅直轴转弯时,仪表就相对转子轴转动,从而能给出转弯的角度和航向的指示。
由于摩擦及其他干扰,转子轴会逐渐偏离原始方向,因此每隔一段时间(如15分钟)须对照精密罗盘作一次人工调整。
②陀螺罗盘。
供航行和飞行物体作方向基准用的寻找并跟踪地理子午面的三自由度陀螺仪。
其外环轴铅直,转子轴水平置于子午面内,正端指北;其重心沿铅垂轴向下或向上偏离支承中心。
转子轴偏离子午面时同时偏离水平面而产生重力矩使陀螺旋进到子午面,这种利用重力矩的陀螺罗盘称摆式罗盘。
近年来发展为利用自动控制系统代替重力摆的电控陀螺罗盘,并创造出能同时指示水平面和子午面的平台罗盘。
③。
利用摆式敏感元件对三自由度陀螺仪施加修正力矩以指示地垂线的仪表,又称陀螺水平仪。
陀螺仪的壳体利用随动系统跟踪转子轴位置,当转子轴偏离地垂线时,固定在壳体上的摆式敏感元件输出信号使力矩器产生修正力矩,转子轴在力矩作用下旋进回到地垂线位置。
陀螺垂直仪是除陀螺摆以外应用于航空和航海导航系统的又一种地垂线指示或量测仪表。
④。
稳定船体的陀螺装置。
20世纪初使用的施利克被动式稳定器实质上是一个装在船上的大型二自由度重力陀螺仪,其转子轴铅直放置,框架轴平行于船的横轴。
当船体侧摇时,陀螺力矩迫使框架携带转子一起相对于船体旋进。
这种摇摆式旋进引起另一个陀螺力矩,对船体产生稳定作用。
斯佩里主动式稳定器是在上述装置的基础上增加一个小型操纵陀螺仪,其转子沿船横轴放置。
一旦船体侧倾,小陀螺沿其铅直轴旋进,从而使主陀螺仪框架轴上的控制马达及时开动,在该轴上施加与原陀螺力矩方向相同的主动力矩,借以加强框架的旋进和由此旋进产生的对船体的稳定作用。
⑤速率陀螺仪。
用以直接测定运载器角速率的二自由度陀螺装置。
把均衡陀螺仪的外环固定在运载器上并令内环轴垂直于要测量角速率的轴。
当运载器连同外环以角速度绕测量轴旋进时,陀螺力矩将迫使内环连同转子一起相对运载器旋进。
陀螺仪中有弹簧限制这个相对旋进,而内环的旋进角正比于弹簧的变形量。
由平衡时的内环旋进角即可求得陀螺力矩和运载器的角速率。
积分陀螺仪与速率陀螺仪的不同处只在于用线性阻尼器代替弹簧约束。
当运载器作任意变速转动时,积分陀螺仪的输出量是绕测量轴的转角(即角速度的积分)。
以上两种陀螺仪在远距离测量系统或自动控制、惯性导航平台中使用较多。
⑥陀螺稳定平台。
以陀螺仪为核心元件,使被稳定对象相对惯性空间的给定姿态保持稳定的装置。
稳定平台通常利用由外环和内环构成制平台框架轴上的力矩器以产生力矩与干扰力矩平衡使陀螺仪停止旋进的稳定平台称为动力陀螺稳定器。
陀螺稳定平台根据对象能保持稳定的转轴数目分为单轴、双轴和三轴陀螺稳定平台。
陀螺稳定平台可用来稳定那些需要精确定向的仪表和设备,如测量仪器、天线等,并已广泛用于航空和航海的导航系统及火控、雷达的万向支架支承。
根据不同原理方案使用各种类型陀螺仪为元件。
其中利用陀螺旋进产生的陀螺力矩抵抗干扰力矩,然后输出信号控、照相系统。
传统机械式陀螺仪
现代光纤陀螺仪
激光陀螺
中国研制的纤维激光陀螺仪
一些类似于十万个为什么之类的科普读物,使用物理学定律解释生活中的现象,而物理学教科书中也使用生活现象作为物理定律的应用。
这正是物理学的威力所在。
但是,如果对现象使用错误的解释,反而容易损害科学精神。
下面举出几个常见的物理学经典错误解释。
1、抽水马桶的水流形成的漩涡,在北半球逆时针旋转,在南半球顺时针旋转。
当我们使用洗脸池或者抽水马桶后放水时,水流通常要形成漩涡从排水孔流出。
为什么会形成漩涡呢?
热心的物理学家这样告诉我们:
由于地球本身的自转,使得在其表面流动的液体和气体(或称为流体),受到“科里奥利力”的作用。
科里奥利是19世纪法国数学家,他发现在旋转球体上移动的物体,会偏离其运动轨迹。
这很容易理解,把等角速度旋转的物体本身看成是一个非惯性系,那么其中运动的物体受到惯性力的作用;特别是,一个惯性力垂直于矢弪方向,是因为沿矢弪方向移动时候,其线速度会发生改变,也就是产生了加速度,这就是受力方向。
在地球北半球,科里奥利力造成流体逆时针旋转,在南半球则顺时针旋转。
物理学家对科里奥利力或科里奥利效应的理解绝对准确,但使用科里奥利效应来解释抽水马桶水的漩涡则大错特错。
科里奥利效应在解释洋流、大气环流之类大规模运动的流体时是成立的。
但是,对抽水马桶的水流,科里奥利效应则几乎毫无影响。
马桶旋转水流的2端,由于地球自转造成的影响几乎是完全相等的,即使有略微不同,也安全无法造成强烈的水流。
那么,马桶时如何造成水流旋转呢?
仔细观察即可发现,答案是马桶边缘的出水孔。
马桶设计人员使水从边缘沿着切线方向喷出,这样造成水流的强烈旋转。
但是,洗脸池和浴缸并没有侧向水流,为什么也会产生深深的漩涡呢?
答案也不是科里奥利效应。
原因在于,水在流向排水孔时,不能把孔完全盖住,否则,空气跑不出来,水也流不下去。
因此,水流必须“排队等候”流入排水孔。
漩涡就是水流排队的方式。
通常,对于某个马桶,漩涡方向是固定的。
这因为排水孔中心并不严格处于马桶或者浴缸的中心,这样,初始的随机偏转效应会累积,最后形成固定的旋转方向。
不相信吗?
多做几个实验吧。
2、飞机在天上飞是由于“伯努利原理”造成的机翼升力。
伯努利也是一位数学家和物理学家,他在1738年发现,当流体的流速提高,表面的静压力会降低。
这个现象称为“伯努利原理”,而几乎所有的物理学教材和科普文章,都使用这个原理,讨论机翼升力的产生。
为了解释这个原理,通常,他们首先会让你拿出2片纸,并用力在纸的中间吹气,瞧,2张纸像粘在一起了!
机翼的上表面是拱起的,而下表面是平坦甚至凹进去。
当气流通过机翼表面,机翼上方空气流速较快,而下面空气流速较慢。
根据“伯努利原理”,下面气流造成的静压力大于上方气流的压力,于是,机翼受到一个向上的作用力,飞机就飞了起来。
遗憾的是,这是完全错误的。
而使用“伯努利原理”解释飞机的升空也是“白努力”。
伯努利效应可以解释一部分升力的来源,但这是非常小的一部分。
如果飞机仅仅根据“伯努利原理”飞行,机翼形状必须非常“拱起”,或者,必须要飞得非常快才行。
飞机的升力主要由另外2个效应提供。
一个是康达效应;另一个是气流冲击效应。
康达效应指的是,气流流经机翼曲面时,气流会紧贴机翼表面(这当然也有一点伯努利效应的含义)。
这样,机翼的形状有效地改变了气流的方向,使离开机翼的气流相对飞机作向下的高速运动。
机翼推开气流,但这个运动受力的反作用力作用于机翼上,相当于气流也在推开机翼,这个力使得机翼向上举起。
另一个重要的效应是气流冲击效应。
当一块平板的方向不是与气流运动方向严格垂直,那么,平板会受到气流的冲击。
飞机的机翼与其自身有一定倾角(4度左右),特别是,当飞机起飞时,要把机头高高抬起,形成更大的倾角,这样在低速时,也可以获得较大的气流冲击效应,以便使几十吨的飞机起飞。
但是,机翼的倾角并不是完全用于提供升力,更多的是为了维持飞机本身的气动布局,以保证飞机在飞行时侯的气动平衡。
飞机是一个非常复杂的气动力学系统,设计师必须保证飞机在x,y,z几个方向上受力平衡。
这就是飞机为什么需要机翼、尾翼、垂直尾翼的原因(那种像飞碟一样的无尾翼飞机设计起来是非常麻烦的);此外,为了操控飞机,机翼上都开有活动襟翼,因此要仔细分析飞机的受力很不容易。
这也是飞机设计原型为什么要进行风洞试验的原因。
下次从新郑薛店机场登机时,不要忘了观察一下机翼的形状。
3、骑自行车“大撒把”是由于陀螺效应。
这是一个典型的错误解释。
自行车只有2个轮子,却为什么可以保持平衡呢?
甚至,高手在骑车的时候,可以双手离开车把,任由车子向前走而不担心摔倒(但要担心前面呼啸而来的汽车)。
物理学家拿出一个陀螺,放在地上转一下,并开始用鞭子使劲抽打它,随着陀螺越转越快,陀螺也像不倒翁一样,虽然只有一个尖着地,却左右摇摆而不肯倒下。
这就是陀螺效应:
旋转的物体有保持其旋转方向(旋转轴的方向)的惯性。
陀螺只有一个旋转方向,已经很稳定了。
而自行车有2个轮子,显然自行车轮子在高速旋转的时候,会使自行车更稳定。
因此,骑车人撒开车把也不会倒下。
但遗憾的是,这并非一个合理的解释。
陀螺效应在保持自行车稳定中也许起到不可忽略的效果,但是,如果自行车单单凭借陀螺效应保持稳定,那么,初学者也应该在高速骑车时不会倒下。
但是,2
 升级会员
升级会员 