定子尺寸与电机结构.docx
《定子尺寸与电机结构.docx》由会员分享,可在线阅读,更多相关《定子尺寸与电机结构.docx(14页珍藏版)》请在冰豆网上搜索。
定子尺寸与电机结构
第四章定子尺寸与电机结构设计
本章主要讨论定子的结构及其材料和压电陶瓷选取,从而根据公式确定定子的尺寸结构,由于在同一种材料中纵向振动的声速与弯曲振动的声速不同,且弯曲振动的声速还与频率有关。
为了保证两种振动模式在高频信号激励下能同时处于共振状态在设计的过程中也尽量的考虑纵振与弯振的频率兼并问题;在定子尺寸确定之后设计了几种不同结构的电机。
4.1电机定子部分设计
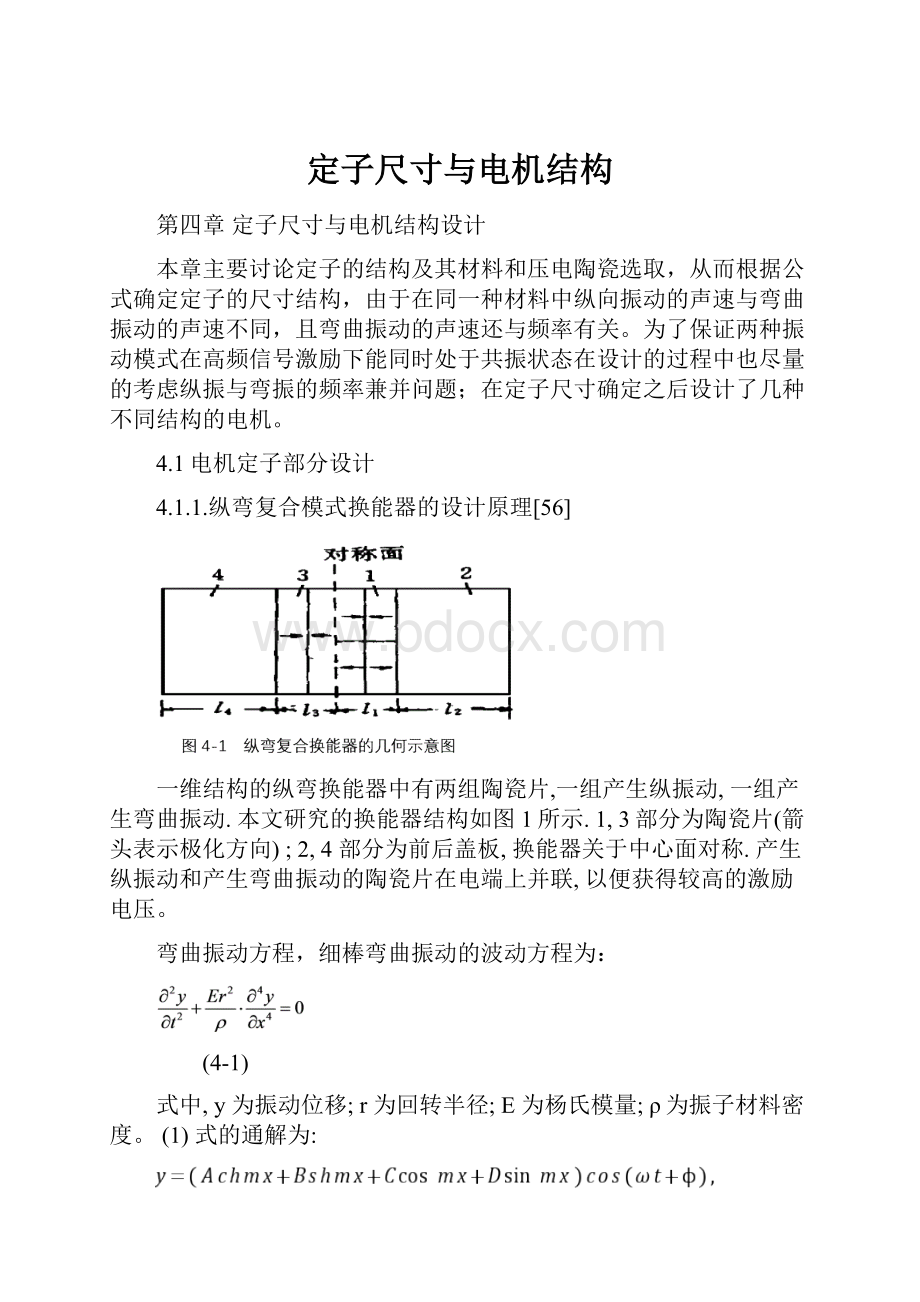
4.1.1.纵弯复合模式换能器的设计原理[56]
一维结构的纵弯换能器中有两组陶瓷片,一组产生纵振动,一组产生弯曲振动.本文研究的换能器结构如图1所示.1,3部分为陶瓷片(箭头表示极化方向);2,4部分为前后盖板,换能器关于中心面对称.产生纵振动和产生弯曲振动的陶瓷片在电端上并联,以便获得较高的激励电压。
弯曲振动方程,细棒弯曲振动的波动方程为:
(4-1)
式中,y为振动位移;r为回转半径;E为杨氏模量;ρ为振子材料密度。
(1)式的通解为:
(4-2)
式中
为激励电压频率;
为纵波速度。
把波动方程的通解应用于压电陶瓷片,由于换能器关于中心对称,可考虑用偶对称振动模式,即振动位移关于中心对称的振动模式,不用奇对称振动模式.奇振动模式的中心为节面,难以激发横向振动.在偶对称振动模式中,只有含chmx和cosmx的项存在,所以,压电陶瓷片的振动位移y1为(略去时间因子)
(4-3)
式中
;
为陶瓷片中纵波波速,因为压电陶瓷存在压电效应,可用
代替杨氏模量,弯曲振动的应变S3为
(4-4)
式中z为陶瓷片上任意一点到中性面的距离,y为横向位移。
纵向力相对于中性面产生的弯矩为
(4-5)
由压电方程:
,(4-6)
给出,从而有(4-7)
把(4-7)式代入(4-5)式,得:
(4-8)
把(4-4)式代入上式,计算等号右边第一项得
(4-9)
式中A为陶瓷片的横截面积.,陶瓷片为薄片,故有(4-10)
利用(4-10)式,可得:
(4-11)
把上式与(4-1)式比较,即得:
(4-12)
将波动方程通解(4-2)式应用于换能器前盖板,可得盖板振动位移y2为
(4-13)
式中
;
为盖板中纵波波速.换能器在陶瓷片和前盖板连接处的边界条件为弯曲位移连续:
即有(4-14)
弯角连续:
(4-15)
弯矩连续:
(4-16)
剪力连续:
(4-17)
前盖板输出端弯矩为零:
(4-18)
前盖板输出端剪力为零:
(4-19)
式中r为截面回转半径,S1和S2分别为陶瓷片和前盖板横截面积,把(4-3)、(4-13)式相应代入(4-14)~(4-19)式,可得6个方程,写成矩阵形式有
(4-20)
其中
(4-21)
式中
为截面的二次矩,
由(4-2)式可得弯曲振动的频率方程为:
(4-22)
图4-1中3,4部分弯曲振动的频率方程同右半部分一样.因为换能器关于中心对称,有,设计时按右半部分计算,左半部分尺寸与右半部分相同.
激发图4-1中第3部分,可在换能器中产生纵振动.换能器左半部分纵振动频率方程为
(4-23)
式中如前所述,换能器左右对称,因此,各参数对应相等,即有余类推.右半部分纵振动频率方程类似(4-23)式,只要把3换成1,4换成2即可.
根据换能器频率方程,可求出换能器各部分尺寸l1,l2,l3,l4,利用(4-22)和(4-23)式,即可设计换能器在单一模式下的谐振尺寸,但对于复合振动模式,必须使纵振动和弯曲振动同时工作在谐振状态.因此要调整换能器尺寸,使两种振动模式在同一频率下都达到谐振.由于纵振动频率高,弯曲振动频率较低,可使纵振动工作在基频模式,弯曲振动工作在泛频模式.
(4-22)和(4-23)式是超越方程,很难求得解析解,必须借助计算机用数值法求解.我们设计了一个纵弯复合振动换能器,其纵振动为基频模式,弯曲振动为第二偶振动模式
为实现电机的运动机理和提高电机的输出性能,电机的设计应满足以下几个方面的要求:
a.选择合适阶次的纵、弯振模态;
b.纵振、弯振频率要保持良好的一致性;
c.定子的头部应具有尽可能大的振幅;
d.压电元件应安放在应变最大的位置上;
e.安装支座应尽量靠近节面,定、转子间要施加合适的预压力,避免模态干扰等等。
下面将在分析上述设计要求的基础上,论述在设计过程中实现这些要求的技术途径。
从理论上讲,定子任意阶次的纵、弯振模态均可以作为电机的工作模态,只要能满足频率一致性的要求,就可以实现电机的运动。
但是如果选择太高阶次的振动模态,会产生一些不良影响。
例如,阶次越高的模态,越不易激发;在高阶振动的频率范围内,存在较多、较密集的非工作模态,工作模态很难远离它们,易造成模态干扰。
总的来说,选择高阶次的振动模态弊大于利,因此选择较低阶次的振动模态是合适的。
经过对定子振动模态的有限元分析计算和反复比较,发现选择一阶纵振和二阶弯振较为理想,而且较容易满足频率一致性这一基本要求。
纵振、弯振频率的一致性是实现超声电机运动的必要条件,也是此种超声电机设计的最基本要求。
因为只有在空间上互相垂直、在相位上相差90°的两个同频简谐振动合成时,才能产生超声电机所需的理想椭圆运动;同时,超声电机工作在高频(>20kHz)、微幅(nm~μm级)的共振点附近,一旦合成椭圆运动所需的某两个共振频率差异较大,就找不到合适的工作点,两相的工作振幅得不到满足,影响电机的输出性能。
频率一致性亦即电机所需的一个一阶纵振和二阶弯振的模态频率要相等。
由于电机定子结构的对称性,二阶弯振频率一般能满足要求,所以关键是使得纵、弯频率一致。
定子的纵、弯模态频率与定子的结构形式、尺寸和材料特性等因素有关。
压电元件的最佳安放位置是应变最大的地方,这样可以使压电元件的振动能量最有效地传递给振子,从而提高驱动效率。
对于采用一阶纵振、二阶弯振模态的超声电机来说,定子的应变与振型的关系如图4-2所示。
可以看出,对于一阶纵振模态,其节面处的应变最大;对于二阶弯振模态,其波峰(或波谷)处的应变最大。
也就是说,纵振、弯振压电陶瓷片应分别安放在纵振模态的节面上和弯振模态的波峰(或波谷)处。
因此,在设计定子时,需要调整压电元件与节面或波峰的相互位置关系,使其相吻合。
安装支座应尽量靠近节面,使定子的振动能量尽可能少地向外界传递,减小能量损失,有利于提高电机的效率。
由于电机采用了纵、弯两种模态,每种模态有各自的节面,所以理想的情况是纵、弯模态能有一个共同的节面。
定子一阶纵振、二阶弯振的振型和节面的分布参看图4-2,一阶纵振有一个节面,二阶弯振有三个节面。
可以看出,二阶弯振中部的节面与一阶纵振的节面靠得最近,通过合理的设计,可以使二者重合。
根据上图可以发现金属细棒L的中间位置恰好即是一阶纵振模态,其节面处的应变最大处又是二阶弯振模态,其波峰(或波谷)处的应变最大处。
也就是说,在细棒中间位置,纵振、弯振压电陶瓷片应分别都安放在纵振模态的节面上和弯振模态的波峰(或波谷)处。
因此,在设计定子换能器时,采取对称结构的模式。
4.1.2纵弯复合模式超声波电机定子尺寸计算[55-62]
在纵弯复合振动模式超声波电机的实际设计中,最重要的也是最不易解决的问题就是换能器的纵向振动共振频率与弯曲振动共振频率一致性问题。
这是因为在同一种材料中纵向振动的声速与弯曲振动的声速不同,且弯曲振动的声速还与频率有关。
为了保证两种振动模式在高频信号激励下能同时处于共振状态,必须使换能器的纵向振动共振频率与弯曲振动共振频率一致,只有这样才能简化激励电路,提高电声效率,同时保证换能器中两种振动模式同步共振工作。
对于这个问题,拟按下面方法解决并设计计算定子的尺寸。
对于由压电陶瓷片与金属盖板组成的复合模式超声换能器,原则上可以从各部分的运动方程出发,利用边界条件分别推出纵向振动和弯曲振动的频率方程。
然而,由于弯曲振动的频率方程很复杂,不适用于一般的工程设计及计算,所以本课题将纵弯复合模式超声换能器近似看成一均匀细棒。
对于一个长为
,截面半径为R的细棒,其纵振及弯曲振动的共振频率方程分别为:
(4-24)
(4-25)
式中f1及fb分别为纵向和弯曲振动共振频率,i、j分别表示纵向振动和弯曲振动的振动模式阶次,c为细棒中纵向振动的传播速度,r为弯曲振动细棒截面的回旋半径,对于均匀圆截面细棒有r=R/2.令f1=fb由上面两式可以得到:
(4-26)
可以看出,当细棒的长度和半径满足上述关系时,棒中第i次纵向振动共振频率等于第j次弯曲振动的共振频率。
一般给定了工作频率就可以根据上面的式子确定细棒的长度和半径。
接着利用纵向振动和弯曲振动的位移分布,求出由于压电陶瓷片的插入而引起的细棒长度修正。
当压电陶瓷片位于纵向和弯曲振动的波节或波腹附近时,其位移分布可以近似看成是按正弦或余弦规律分布的,对于纵向振动,相邻两部分的纵向位移及纵向力连续;对于弯曲振动,横向位移及横向力连续。
因此可以得到方程:
(4-27)
(4-28)
上式中l0为压电陶瓷片总长度的一半,l11及l1b分别为纵振动及弯曲振动时由压电陶瓷片引起的细棒修正长度的一半,ρ0、S0、E0、及ρ1、c1、S1、E1分别为压电陶瓷和金属盖板的密度,纵向振动声速,截面面积及弹性模量k0=ω/c0及k1=ω/c1分别为陶瓷及金属中的纵向振动波数,ν0=ω/cob,ν1=ω/c1b分别为陶瓷及金属中的弯曲振动波数。
当金属盖板与陶瓷片的外径相同时,给定频率、截面形状及尺寸就可以根据上面两式计算出l11及l1b,l11和l1b值是不同的,l11大于l1b。
对于夹心式纵弯复合模式压电陶瓷换能器,压电陶瓷片的插入必将影响细棒的共振频率和系统的振动位移分布,因此必须对压电陶瓷片引起的长度变化进行修正。
压电陶瓷长度修正的前提条件是,陶瓷片的插入不影响换能器原来的振动状态,即阻抗和振动位移分布不变。
另外,由于不同的振动模式对应不同的位移分布,因而其长度修正也不同,必须加以不同的对待。
如果压电陶瓷片总长度比较小,考虑到弯曲振动的频率与长度的平方成反比,而纵向振动的频率与长度成反比,我们可以得到近似的修正公式:
(4-29)
式中的lc为弯曲和纵振动同时存在时细棒的长度修正值。
因此,经过修正后纵弯复合模式超声换能器的总长度为
(4-30)
此时,金属盖板的长度
和
为:
(4-31)
对于纵向复合压电换能器中所用到的压电材料参数的选择,主要注意诱电损失,压电常数
,机电耦合系数
和机电品质因数
。
诱电损失是指压电陶瓷材料在交变电场的作用下会产生介电损耗,描述介电损耗的参数为介电损耗正切
。
介电损耗功率随
的增加而正比例增大,所以
越大,压电材料的性能越差。
压电换能器的转换效率关键是由这个参数决定的,所以在选择压电材料时,要尽可能选择
小的。
压电材料除了有介电损耗外,还有机械损耗,即压电振子在交变电场作用下产生激烈的机械共振时,要克服内摩擦而消耗的能量。
反应机械损耗大小的参数时机械品质因数
,
越大,机械损耗越小。
所以这个参数也是选择压电陶瓷材料的一个重要参数。
衡量压电陶瓷材料将电能转换机械能的能力大小的参数时机电耦合系数
,
越大,转换能力越高。
所以它也是选择压电材料是必须要考虑的一个因素。
选用的压电陶瓷元件为国产PZT-4型材料,其材料参数为:
=7500kg/m3,
=2950m/s。
换能器的前后盖板材料为45号钢,
=7800kg/m3,
=5050m/s,若给定频率f=25.7KHz,由公式:
;,根据材料参数,令
=
由前述可知:
=1;
=2代入上式可得:
=73.6mm,R=7.5mm
接着利用纵向振动和弯曲振动的位移分布,求出由于压电陶瓷片的插入而引起的细棒长度修正。
将ω=2×
×f=16159.2rad/s;;
;
;
;
代入式(4-27)和(4-28)计算可得:
=25.7mm;
=16.5mm
根据近似修正长度公式:
得到:
=15.8mm,
为弯曲振动和纵向振动同时存在时的长度修正值,因此经过修正后纵弯复合模式超声换能器的总长度:
=46(mm)
所以金属盖板的长度
=49.1-10.1=21(mm)。
4.2纵弯复合模式超声波电机结构设计[55-62]
定子在外加超声频率的电压在压电陶瓷上时,会在定子端部合成椭圆运动,当定子端部的每个质点的椭圆运动方向一致时,在定子与移动体接触时,必然驱动移动沿着直线方向运动。
在第三章的讨论中,我们可以看到纵弯复合型超声波电机的定子在定子端部形成的椭圆轨迹各点是一致的,因此当定子与移动体接触时,移动体是做直线运动的,哈尔滨工业大学就研制了一种基于纵弯模式的直线电机,其结构如图4-3所示。
另外,南京航空航天大学也研制了一种基于纵弯复合模式的两自由度的直线型超声波电机,该电机利用两组摆放相互垂直的弯曲振动与纵振复合,可以驱动转子进行两个自由度的直线运动。
定子和转子的接触状态一般可分为接触状态和分离状态。
定、转子的接触情况取决于定转子间的预压力的大小和定子表面激励的纵振动的振幅。
如果施加的预压力比较小,转子将在定子振动的某一时刻与定子相脱离;如果预压力很小时,有可能转子被驱动后,定子振动了几个周期,转子才与定子再次接触,这样会影响摩擦传动的效率。
可见预压力在超声波电机中的重要性,本次设计的直线电机只需要将前文设计的定子和导轨固定在底座上即可,这种直线电机采用兰杰文振子结构,结构简单,装配简单,用弹簧在定子底部推着定子沿着与导轨垂直的轨道顶在导轨上实现预压力的加载。
对于一个被约束在一个平面XOY内的运动体来说有三个自由度即沿X轴运动,Y轴运动和在平面XOY平面内转动。
当运动体有一点W固定时,沿X,Y轴的自由度就被约束了,只剩下在XOY平面转动这一个自由度,这时候移动体只要受到一个不通过固定点W的力就会产生以W为圆心的旋转运动,任何一个作用在运动体上的力都可以分解成一个过圆心的径向力和垂直径向的切向力,对于旋转运动来说径向力是无效力,切向的力才能输出有效力矩使移动体旋转。
一种方案是采用转子与定子主轴垂直的结构,其结构简图如图4-4所示,就像水轮机的结构,转子的轴在两边通过轴承固定在电机外壳上,定子驱动与转子接触的位置做沿转子切线方向上的直线运动,从而使得转子做回旋运动,这种结构的优点是只需要一个定子与转子就能实现转子的回旋运动,而预压力可以考虑从定子底部通过弹簧加压。
在设计该方案时要注意避免陶瓷片的放置位置不正确导致电机不工作。
要使转子旋转也可以采用定子与转子偏心的结构如图4-5所示,陶瓷片摆放在正确的位置之后,当定子受到超声频率电压激励时,会在定转子接触位置产生垂直纸面的摩擦力,依靠这个摩擦力就可以驱动转子做旋转运动,在图上可以很容易看到这种结构电机的缺点,在转子上加预压力由于右部分没有支撑,必然导致转子向右边倾斜,从而使得定子表面预压力不平均,电机运行时会不平稳并且有很大的噪声,而且转子的倾斜也有可能使转子卡住而不能正常工作,为了改进这些缺点,设计了一种三个定子结构的纵弯复合模式的超声波电机,其结构如图4-5所示,制作一个电机底座,在底座上的一个圆周上间隔120度铣三个沉孔,用螺钉将三个定子固定在这三个沉孔上,固定时候陶瓷片的摆放方向要一致,使得定子对转子的驱动力的方向沿圆周的切线方向,并且都是顺时针或者逆时针方向,这样,在这三个定子上面放置转子就会沿着顺时针或者逆时针旋转。
这种电机结构比较复杂,对于加工精度要求较高,要求三个定子在同一个圆周上,装配之后三个定子的高度要一致,否则电机运行时有定子悬空影响电机的效率甚至导致电机无法工作,另外要保证三个定子尽量在尺寸、材料等参数上保持一致,从而保证三个定子在同一频率的电压下达到相同的谐振效果以提高电机的平稳性和高效性。
虽然该结构电机有上面的一些不利因素,但是它同时具有一些优点,因为它有三个定子一起驱动转子,所以应该具有比较大的转矩,定子远离中心的偏心结构使得转子的转速偏低,加强了超声波电机的低转速大扭矩的特点,而且在实际应用中如果两台定子产生故障,只有一个定子仍然可以继续工作,加强了系统的可靠性。
4.3本章小结
在这一章主要是确定定子结构尺寸,以及电机的结构设计。
具体做了以下几点工作:
1.将细棒弯曲振动的波动方程的通解应用到压电陶瓷片,以及相关理论的推导计算;
2.利用细棒弯曲振动的频率方程计算定子前后盖板长度,并且在计算中考虑纵振动与弯曲振动频率兼并的问题;
3.参考国内在纵弯复合型超声波电机研制方面取得的成就,提出了两种不同方案的纵弯复合模式的旋转电机。
 升级会员
升级会员 