相位式光电测距仪的工作原理.docx
《相位式光电测距仪的工作原理.docx》由会员分享,可在线阅读,更多相关《相位式光电测距仪的工作原理.docx(17页珍藏版)》请在冰豆网上搜索。
相位式光电测距仪的工作原理
§4.2相位式光电测距仪的工作原理
相位式光电测距仪的种类较多,但其基本的工作原理是相同的。
本节将讨论相位式光电测距仪的工作原理,并着重介绍它的几个主要部件的工作原理。
4.2.1相位式光电测距仪的工作原理
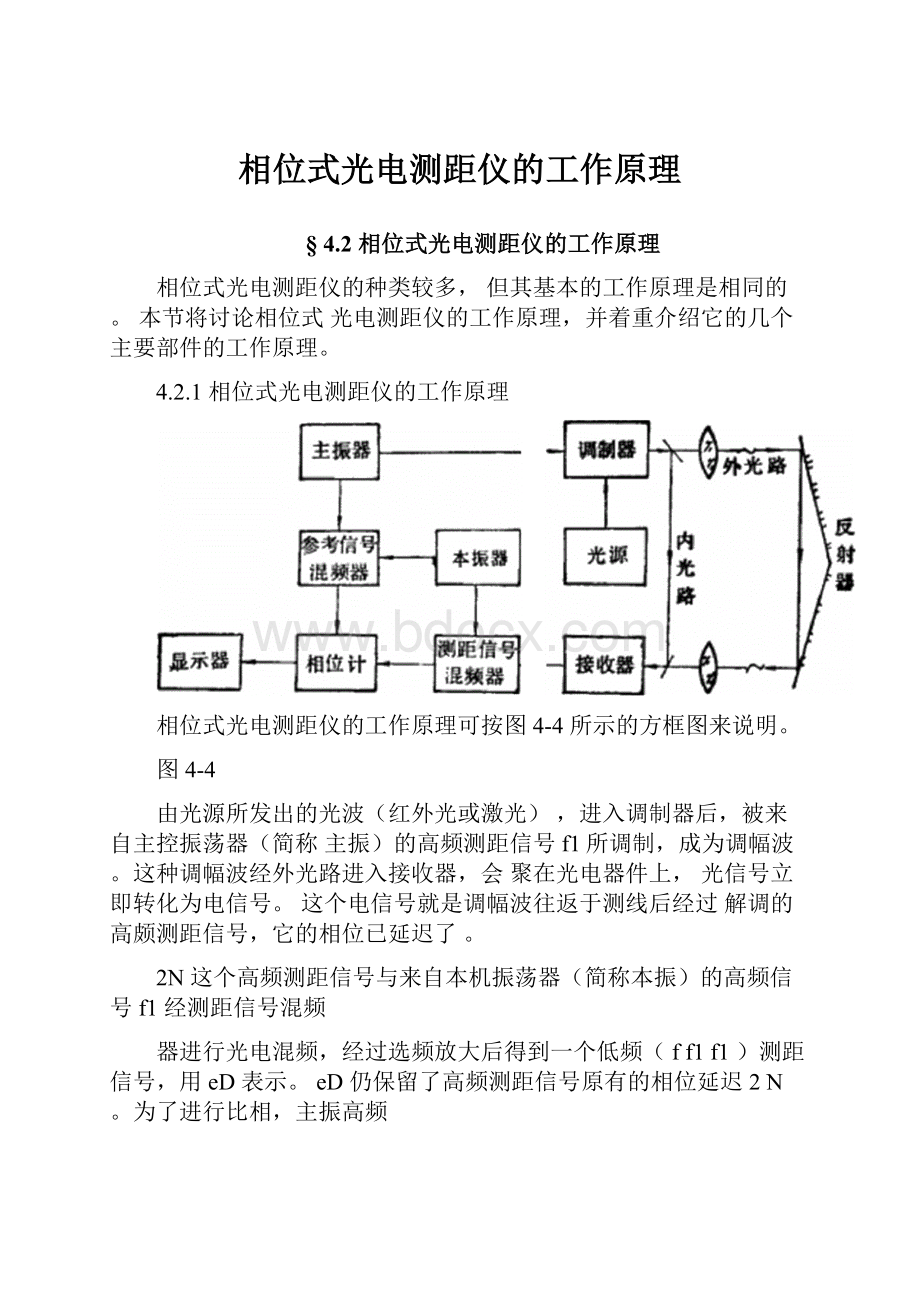
相位式光电测距仪的工作原理可按图4-4所示的方框图来说明。
图4-4
由光源所发出的光波(红外光或激光),进入调制器后,被来自主控振荡器(简称主振)的高频测距信号f1所调制,成为调幅波。
这种调幅波经外光路进入接收器,会聚在光电器件上,光信号立即转化为电信号。
这个电信号就是调幅波往返于测线后经过解调的高颇测距信号,它的相位已延迟了。
2N这个高频测距信号与来自本机振荡器(简称本振)的高频信号f1经测距信号混频
器进行光电混频,经过选频放大后得到一个低频(ff1f1)测距信号,用eD表示。
eD仍保留了高频测距信号原有的相位延迟2N。
为了进行比相,主振高频
测距信号f1的一部分称为参考信号与本振高频信号f1同时送入参考信号混频器,经过
选频放大后,得到可作为比相基准的低频(ff1f1)参考信号,e0表示,由于e0没有经过往返测线的路程,所以e0不存在象eD中产生的那一相位延迟。
因此,eD和e0
同时送人相位器采用数字测相技术进行相位比较,在显示器上将显示出测距信号往返于测线的相位延迟结果。
当采用一个测尺频率f1时,显示器上就只有不足一周的相位差所相应的测距尾数,超过一周的整周数N所相应的测距整尺数就无法知道,为此,相位式测距仪的主振和本振二个部件中还包含一组粗测尺的振荡频率,即主振频率f2,f3和本振频率
f2,f3。
如前所述,若用粗测尺频率进行同样的测量,把精测尺与一组粗测尺的结果组合起来,就能得到整个待测距离的数值了。
4.2.2相位式光电测距仪各主要部件的工作原理
1.光源
相位式测距仪的光源,主要有砷化镓(GaAs)二极管和氦-氖(He-Ne)气体激光器。
前者一般用于短程测距仪中,后者用于中远程测距仪中。
下面对这二种光源作一介绍。
(1)砷化镓(GaAs)二极管
砷化镓(GaAs)二极管是一种晶体二极管,与普通二极管一样,内部也有一个PN
结,如图4-5所示。
它的正向电阻很小,反向电阻较大。
当正向注入强电流时,在PN
结里就会有波长为0.72~0.94m之间红外光出射,而且出射的光强会随着注入电流的大小而变化,因此可以简单地通过改变馈电电流对光强的输出进行调制,即所谓“电流直接调制”。
这对测距仪用作光源十分有意义,因为能直接调制光强,无需再配备结构复杂、功耗较大的调制器。
此外,砷化镓二极管光源与其他光源比较,还有体积小重量轻,结构牢固和不怕震动等优点,有利于使测距仪小型化,轻便化。
图4-5图4-6
GaAs二极管有两种工作状态,一种是发射激光,称为GaAs激光器;另一种是发射
红外荧光,称为发光二极管。
两者的区别,主要是注入电流强度的不同。
由于GaAs发
o光管,发射连续的红外光频带较宽(100~500),波长不够稳定,功率较小(约3mW)和发散角大(达50o),故采用这种光源的测距仪的测程都不远,一般在3km以内。
红外
光的波长,因GaAs掺杂的差异和馈电电流等不同而异。
如国产HGC-1红外测距仪的
0.93m;瑞士DI3和DI3S的分别为0.875m和0.885m;瑞典AGA-116的=0.91m。
(2)氦-氖(He-Ne)气体激光器
如图4-6所示氦-氖气体激光器,它由放电管、激励电源和谐振腔组成。
放电管为内径几个毫米的水晶管,管内充满了氦与氖的混合气体,管的长度由几厘米到几十厘米不等。
管越长,输出功率越高。
在管的两端装有光学精密加工的布儒斯特窗。
激励电源一般可用直流、交流或高频等电源的放电方式,目前用得最多的是直流电源放电方式,其优点是激光输出稳定。
谐振腔由两块球面反射镜组成,其中一块反射镜是全反射的,另一块能部分透光,.其透射率2%,即反射率仍有98%。
放电管中的氦原子,在激励电源的激励下,不断跃迁到高能级上,当它和氖原子碰撞时能量不断地传递给氖原子,使氖原子不断跃迁到高能级上,而自己又回到基能级上。
与此同时,处在高能级上的氖原子在光子的激发下,又受激辐射跃迁回基能级上,这时便产生出新的光子。
一般说来,多数光子将通过管壁飞跃出去,或被管壁吸收,只有沿管壁轴线方向的光子将在两块反射镜之间来回反射,从而造成光的不断受辐射而放大。
布儒斯特窗是光洁度很高的水晶片,窗面法线与管轴线的夹角叫做布儒斯特角(见图4-6)。
这个角度随窗的材料而不同,在水晶窗的情况下,它大约等于56o。
当光波沿
管轴线方向入射至窗面时,光波电振动沿纸面方面的分量(图中以箭头表示)将不被反射而完全透过去;而沿垂直于纸面方向的分量(图中以黑点表示)却被反射掉了,这样剩下来的光就是沿纸面振动的直线偏振光。
尔后,这种光在谐振腔内来回运行,由于受激辐射的新生光子与原有的光子具有相同的振动方向,也就是说,积累起来的光始终是沿纸面方向振动的直线偏振光,因而每当它们来回穿过布濡斯特窗面时,几乎全部透过去,而很少受到光的损失。
装有布懦斯特窗的激光器,直接输出直线偏振光,使得光电调制器组可以不要起偏振片,从而避免了一般调制器的入射光,因通过起偏振器而造成光强损失约50%的缺陷。
所以装有上述激光器的测距仪的最大测程可达40~50km。
氦氖气体激光器发射的激光,其频率、相位十分稳定,方向性极高,且为连续发射,因而它广泛地应用于激光测距、准直、通讯和全息学等方面。
但氦氖气体激光器也有其缺点,即效率很低,其输出功率与输入功率之比仅千分之一。
因此,激光测距仪上的激光输出功率仅约2~5mW。
2.调制器
采用砷化镓(GaAs)二极管发射红外光的红外测距仪,发射光强直接由注入电流调制,发射一种红外调制光,称为直接调制,故不再需要专门的调制器。
但是采用氦氖激光等作光源的相位式测距仪,必须采用一种调制器,其作用是将测距信号载在光波上,使发射光的振幅随测距信号电压而变化,成为一种调制光,如图4-7电光调制是利用电光效应控制介质折射率的外调制法,也就是利用改变外加电压E来控制介质的折射率。
目前的光电测距仪都采用一种一次电光效应或称普克尔斯效应,即nn0f(E);根据普克尔斯效应(线性电光效应)制作的各种普克尔斯调制器。
这种调制器有调制频带宽,调制电压较低和相位均匀性较好的优点。
用磷酸二氘钾(KD2PO4)晶体制成的KD*P调制器则是目前较优良的一种普克尔斯调制器。
在使用光电测距仪进行精密测距时,必须在测线的另一端安置一个反射器,使发射的调制光经它反射后,被仪器接收器接收。
用作反射器的棱镜是用光学玻璃精细制作的四面锥体,如三个棱面互成直角而底面成三角形平面(图4-8(a))三个互相垂直的面
上镀银,作为反射面,另一平面是透射面。
它对于任意入射角的入射光线,在反射棱镜的两个面上的反射是相等的,所以通常反射光线与入射光线是平行的。
因此,在安置棱
镜反射器时,要把它大致对准测距仪,对准方向偏离在20o以内,就能把发射出的光线
经它折射后仍能按原方向反射回去,使用十分方便。
图4-8(b)用于发射、接收系统
同轴的测距仪,图4-8(c)用于发射、接收系统不同轴的测距仪。
图4-8实际应用的棱镜反射器如图4-9,根据距离远近不同,有单块棱镜的,也有多块棱镜组合的。
安置反射器时是将它的底座中心对准地面标石中心,但由于光线在棱镜内部需要一段光程,使底座中心与顾及此光程影响的等效反射面不相一致,距离计算时必须顾及此项影响。
a)(b)
图4-9
4.光电转换器件
在光电测距仪中,接收器的信号为光信号。
为了将此信号送到相位器进行相位比较,必须把光信号变为电信号,对此要采用光电转换器件来完成这项工作。
用于测距仪的光电转换器件通常有光电二极管,雪崩光电二极管和光电倍增管。
现在分别介绍如下。
(1)光电二极管和雪崩光电二极管光电二极管的管芯也是一个PN结。
和一般二极管相比,在构造上的不同点是为了便于接收入射光,而在管子的顶部装置一个聚光透镜(图4-10(a)、(b)),使接收光
通过透镜射向PN结。
接入电路时,必须反向偏置,如图4-10(c)所示。
光电二极管具有“光电压”效应,即当有外来光通过聚光透镜会聚而照射到PN结
时,使光能立即转换为电能。
再者,光电二极管的“光电压”效应与人射光的波长有关,对波长为0.9~1.0m的光(属于红外光)有较高的相对灵敏度,且使光信号线性地变换为电信号。
光电二极管由于体积小,耗电少,加之对砷化镓红外光有较高的相对灵敏度,因而在红外测距仪中常用作光电转换器件。
它的结电容很小,因而响应时间很短,灵敏度很高。
瑞士的DI3S红外测距仪就是用雪崩光电二极管作光电转换器件的。
必须注意,光电二极管特别是雪崩光电二极管应防因强光照射而损坏,并时时注意减光措施。
(2)光电倍增管光电倍增管是一种极其灵敏的高增益光电转换器件。
它由阴极K、多个放射极和阳极A组成,如图4-11所示。
各极间施加很强的静电场。
当阴极K在光的照射下有光电子射出时,这些光电子被静电场加速,进而以更大的动能打击第一发射极,就能产生好几个二次电子(称为二次发射),如此一级比一级光电子数增多,直到最后一级,电
我国研制的激光测距仪(JCY-2、DCS-1)使用国产的CDB-2型光电倍增管。
这种管子除阴极,阳极和11个放射极以外,还在阴极和第一级放射极之间设置了聚焦极F,如图4-12所示。
为了解决接收信号的差频问题(称为光电混频),在管子工作时,把阴极K和聚焦极F看成一个二极管,把频率为f1的本振电压加在K-F上,那么在这个二极管上既有光电效应的接收信号(频率为f1)电压,又有本振(频率为f1)电压,
通过“二极管”的非线性关系,就产生了混频作用,经过倍增放大,最后所得到的阳极电流,除高次谐波分量外,还包含着两频率之和(f1+f1)及两频率之差(f1-f1)=f,经过简单的R,C,二型滤波装置(见图4-12),把大于f1(f1=15MHz)的高频滤掉,即
f1加在第11放射极与
能获得低频f信号,以上称为光电混频。
当然,若把本振信号阳极A所组成的二极管上(见图4-12),也可以进行光电混频。
图4-12
在光电倍增管的前面,还设置了一个连续减光板,以便按距离的远近调节进入的光强的大小,同时可借以避免强光照射管子的阴极,造成阴极疲劳和损坏,起到保护作用。
5.差频测相
在目前测相精度一般为千分之一的情况下,为了保证必要的测距精度,精测尺的频率必须选得很高,一般为十几MHz~几十MHz,例如HGC-1型短程红外测距仪的精测尺频率f1=15MHz,JCY-2型精密激光测距仪的精测尺频率f1=30MHz。
在这样高的频率下直
接对发射波和接收波进行相位比较,受电路中寄生参量的影响在技术上将遇到极大的困难。
另外为了解决测程的要求,须选择一组频率较低的粗测尺,当粗测尺频率为150kHz时,与精测尺频率15MHz,两者相差100倍。
这样有几种频率就要配备几种测相电路,使线路复杂化。
为此,目前相位式测距仪都采用差频测相,即在测距仪内设置一组与调制光波的主振测尺频率(fi)相对应的本振频率(fi),经混频后,变成具有相同的差频f。
也就是使高频测距信号和高频基准信号在进入比相前均与本振高频信号进行差频,成为测距和基准低频信号。
在比相时,由于低频信号的频率大幅度降低(如精测尺
频率为15MHz,混频后低频为4kHz时,降低了3750倍),周期相应扩大,即表象时间得到放大,这就大大地提高了测相精度。
此外,因测相电路读数直接与频率有关,频率不同,电路亦应改变。
若用差频测相,使“精”、“粗”测尺的各个不同的高频信号差频后均成为频率相同的低频信号,则仪器中只要设置一套测相电路就可以了。
图4-13
图4-13是相位式测距仪的差频测相方框图。
现由图说明混频只改变频率,而不改
变相位关系。
设主振测尺频率为f,其角频率2f发射时刻t的相位为t,为初相角。
设本振频率为f,角频率为2f,发射时刻t的相位为t,为其初相角。
主振和本振两个高频信号经过混频后,取其差频f=ff,得到低频参考信号e0,该信号在发射时刻t的相位为
0()()(4-15)
主振测距信号到达反射器所需的时间为tD,因此产生的相位延迟为tD,测距信
号到达反射器的相位为ttD;再从反射器回到测站相位同样延迟了tD,因此
测距信号接收时的相位为tt2D(这里t2D2tD)。
测距信号与本振信号进行光
电混频后取其差频f,得到低频测距信号eD,该信号在发射时刻t的相位为
D()t()t2D(4-16)
在相位器中测定测距信号与参考信号两种低频信号的相位差2D,即为(4-l6)式和
(4-15)式相减
2DD0t2D(4-17)
由此可见,相位差2D即为测距信号在2倍测线距离上的相位延迟。
以上说明了经混频后的低频信号仍保持着原高频信号间的相位关系。
6.自动数字测相
随着集成电路和数字技术的发展,为测距仪向自动化和数字化方向发展提供了条
件。
目前许多中、短程测距仪几乎都采用自动数字测相技术以及距离的数字显示。
自动数字测相的基本思想是:
当参考信号e0和测距信号eD按自动数字测相法作相
位比较时,首先将其相位差换成方波,然后再用一个标准频率作填充脉冲填入
内,每一个填充脉冲代表一定距离,如1mm,1cm等,于是用计数器计算出填充脉冲的
个数,通过显示器即能直接显示出相应的距离。
图4-14是自动数字测相原理的方框图。
图4-14
在比相前,先将参考信号e0和测距信号eD分别进人通道1、2,经过放大与整形后成为倒相(相位倒转180o)的方波e0和eD(见图4-15),两方波的频率仍为主振与本
见图4-14中的CHP)
振的差频频率f,其周期T1f。
将e0和eD分别加至检相触发器的两个输入端R和S,方波e0的后沿(负跳变)使触发器的Q端输出高电平,相当于使触发器开启;方波eD的后沿使Q端输出低电平,相当于使触发器关闭。
通过检相触
发器获得检相脉冲信号e3,此脉冲宽度对应着两个比较信号的相位差,它的周期也
是T(见图4-15中检相脉冲e3),将e3作为电子门Y1的开关控制信号,其前沿(正跳变)使Y1门开启,后沿(负跳变)将Y1门关闭,于是在测距信号和参考信号的相位差
所相应的一段时间t(tT)内,时标脉冲就能通过电子门Y1。
而它所输出的脉冲2
数m(见图4-15Y1门输出e1)就反映了e0和eD间的相位差,这是单次检相过程。
单次检相的脉冲数为
4-18)
mtTf0
T0T02f2
由于f和f0均为仪器设计值,因此根据计数器计取的m就可以计算测距信号eD和参考信号e0之间的相位差尾数。
而由和测尺长度/2可以算出所测距离,因此
每个时标脉冲就代表一定的距离值。
例如设f0=15MHz,f=6kHz测尺长为/2=10m,
则
f0150000002500
f6000
即表示相应于10m的距离有2500个时标脉冲,因此每个时标脉冲代表4mm。
根据计数
器所计的时标脉冲数,经过换算,就可以在显示器上显示出距离的数值。
为了减少测量过程中大气抖动和电路噪音等偶然误差的影响,以提高测距精度,要求在测相电路中取几百次到几千次的相位测量的平均值作为测相的结果。
为此在Y1门
后面加第二个电子门Y2(见图4-14),Y2门由一个方波电压eF控制相位测量的持续时间TF。
即在TF时间内,由Y1门输出的测相时标脉冲可以全部通过Y2门(输出为e2),
进入计数器,在TF时间内的测相次数为
nTFTFf(4-19)
TF
由Y2门输出的总测相脉冲数为
f0
MnmTFf0TFf0(4-20)
f22
而
M2
TFf0
从上式可以看出,仪器设计时恰当地选定f0与TF之值,则根据计数器测得的时标
总脉冲个数M就可以得到相位差,由算得距离,因此计数器所计的总脉冲数M可以直接与所测距离相对应,最后在显示器中显示出距离值。
在相位式测距仪中,还设置了内光路(见图4-16)。
设测距信号先后经内光路和外
光路行程所迟后的相位差各为内和外,则内、外光路测距信号(eD)内和(eD)外在相位器
中分别与参考信号e0的比相结果为
图4-16
上式中,是仪器内部电子路线在传送信号过程中产生的附加相移。
随仪器工作状态而变化,是随机相移。
测距时,交替使用内、外光路进行测相,在交替过程的短时间内,可以认为附加相移没有变化,于是取内、外光路比相结果的差值作为测量结果,
4-22)
不难看出,以上结果已经消除了附加相移不稳定的影响,从而保证了测距的精度。
由以上所介绍的相位式光电测距仪的工作原理可以看出,当进行一次测距时,既有精测尺和粗测尺频率的变换,又有每个测尺频率工作时的内、外光路的转换,此外在自动数字测相中,还有计数器清零、测相、运算衔接、显示等步骤,以上有关的这些电路单元必须正确地按一定的程序有条不紊地进行工作。
因此在仪器中还必须设置逻辑控制电路及相应的伺服机构,以实现测距的自动化。
(二)相位法测距
在工程中使用的红外测距仪,都是采用相位法测距原理。
它是将测量时间变成测量
调制光在测线中传播的相位差。
通过测定相位差来测定距离,称为相位法测距。
若对发光管注入交变电流,使发光管发射的光强随着注入电流的大小发生变化,见图5—14(b),这种光称为调制光。
设调制光的角频率为ω,则调制光在测线上传播时的相位延迟φ为:
则D=(5—29)
由图(5—15)中可以看出,相位φ还可以用相位的整周数(2π的)个数N和不足一个整
周数的Δφ来表示,则
(5—30)
将代入式(5—29),得相位法测距基本公式:
图5-15相位法测距原理示意图
式中λ为调制光的波长,
因为Δφ为不足整周期的相位移尾数,所以Δφ<2π,则ΔN<1为不足整周期的比例数。
将该式(5-31)与钢尺量距公式(5-1)相比,相当于尺长(l),N为整尺段数,ΔN相当于不足整尺段的比例数。
令LD=
将上式代入(5-31)式,则得相位法测距的基本公式为:
D=LD(N+ΔN)=NLD+ΔNLD(5-32)
比较(5-1)与(5-32)两式,可以看出二者完全相似。
因此,LD常称为“光尺”。
在测距时要测定测线的温度、气压和湿度,对所测距离进行气象改正。
问题:
测距仪只能测出不足一个整周期的相位差Δφ,而不能测出整周数N。
例如,“光尺为10m,只能测出小于10m的距离;光尺1000m只能测出小于1000m的距离。
由于仪器测相精度一般为1/1000,所以1km的测尺测量精度只有米级。
测尺越长、精度越低;解决办法:
采用多个调制频率(即n个测尺)进行测距。
短测尺(称为精尺)测定精确的小数。
长测尺(称为粗尺)测定距离的大数。
例如,某双频测距仪,测程为2km,设计了精、粗两个测尺,精尺为10m(载波频率f1=15MHz),粗尺为2000m(载波频率f2=75kHz)。
用精尺测10m以下小数,粗尺测l0m以上大数。
如实测距离为1356.678m,其中:
精测距离6.678m
粗测距离1350m仪器显示距离1356.678m
对于更远测程的测距仪,可以设计若干个测尺配合测距。
可以同时进行角度(水平角、竖直角)测量和距离(斜距、平距、)测量,即可以完成该测站的所有测量工作,这种新型测量仪器称为全站仪。
 升级会员
升级会员 