机械原理复习题.docx
《机械原理复习题.docx》由会员分享,可在线阅读,更多相关《机械原理复习题.docx(38页珍藏版)》请在冰豆网上搜索。
机械原理复习题
一、自由度的计算
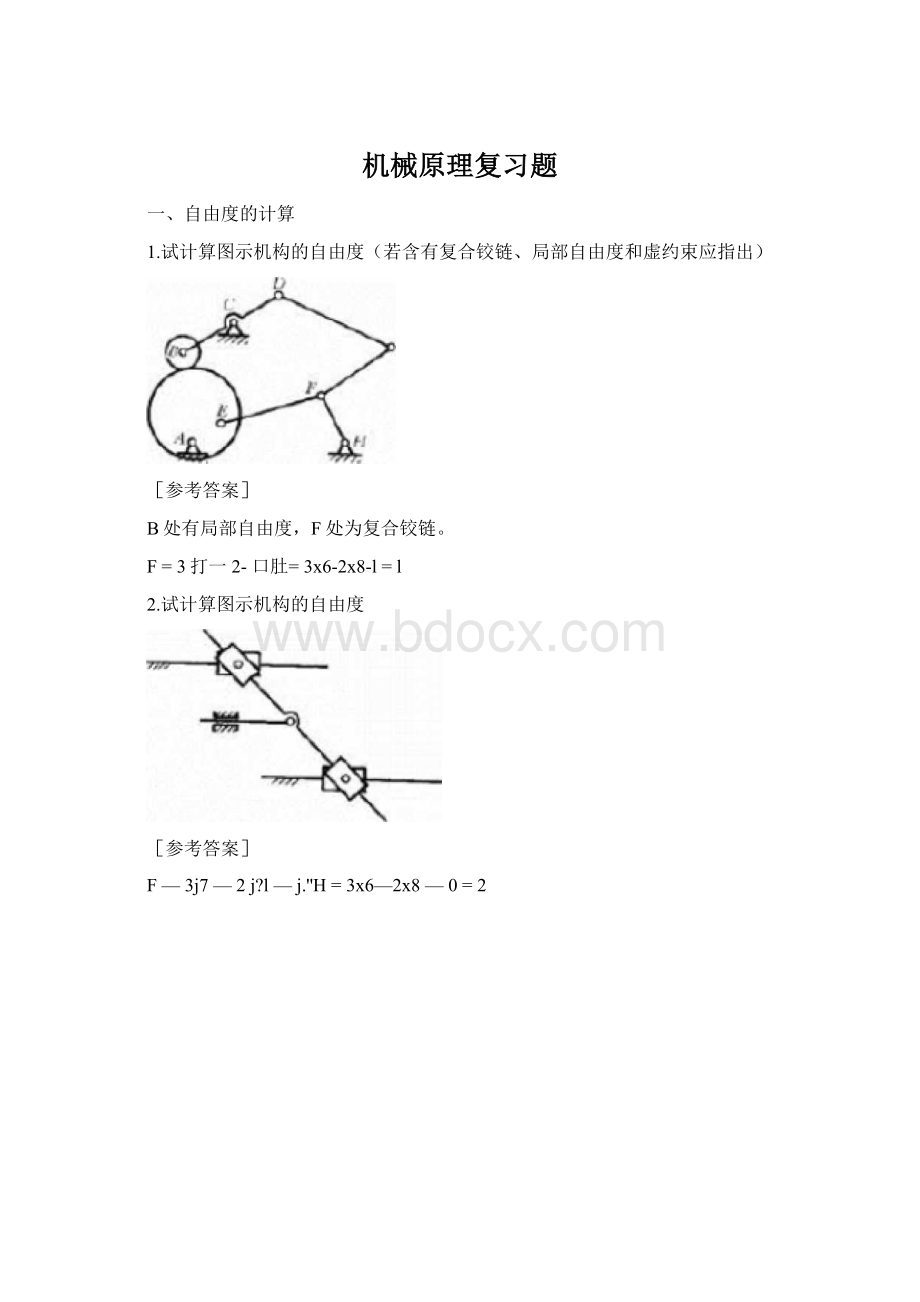
1.试计算图示机构的自由度(若含有复合铰链、局部自由度和虚约束应指出)
[参考答案]
B处有局部自由度,F处为复合铰链。
F=3打一2-口肚=3x6-2x8-l=l
2.试计算图示机构的自由度
[参考答案]
F—3j7—2j?
l—j.''H=3x6—2x8—0=2
F--p=3x4-2x6^0=0
L」口
[参考答案]
F=3J?
—2j&l—左卫=3x5—2x7—0=1
5.试计算图示机构的自由度
F—3_?
7—2—j;'H=3x8—2x11—0=2
6.试计算图示机构的自由度
门二人卫t=9、%=6
F=3J7-2j»L-jt*H=3x7—2x9-C=3
或把三角形看成一刚体,则’■-:
F=3n-2jdl-jo卫=3x5一2x6-0=3
7.计算图示机构的自由度,并在图上指出其中的复合铰链、局部自由度和虚约束。
[参考答案]
#=3x7-2>:
9-lx2=1
B为局部自由度;C(或D)为虚约束;G为复合铰链
[参考答案]
F=3—2j&l—左卫=3x5—2x7—1=0
9.试述机构有确定运动的条件,并判断下图所示两机构是否有确定运动。
[参考答案]
(1)机构有确定运动的条件是机构自由度大于零且等于原动件数目。
⑵图aI丄」2'■'
原动件数大于自由度,无法运动。
(3)图b'''-:
丄-
原动件数小于自由度,无确定运动。
10.试计算图示机构的自由度(若含有复合铰链、局部自由度和虚约束应指出)。
[参考答案]
B处有局部自由度。
F==3x^1-2x5-1=1
11.试计算图示机构的自由度(若含有复合铰链、局部自由度和虚约束应指出)
[参考答案]
B处为复合铰链。
F=3—左卫=3x5—2x7—0=!
12.试计算图示机构的自由度(若含有复合铰链、局部自由度和虚约束应指出)
[参考答案]
C处有局部自由度、复合铰链。
D处为复合铰链。
F,G处有局部自由度。
去掉局部自由度后,’,_■--L:
F=3?
;-2丹=3x6-2x7-3=1
13.试计算图示机构的自由度(若含有复合铰链、局部自由度和虚约束应指出)
[参考答案]
C处为复合铰链。
J(或F)处有虚约束。
_-:
:
'1
14.试计算图示机构的自由度,并指出该机构中有无虚约束、局部自由度或复合铰链,若有,指出在何处
[参考答案]
E(或F)处有虚约束,滚轮D处有虚约束及局部自由度,去掉后得:
广'■'1
F=3j?
——左卫=3x5—2x1=2
15.试计算图示机构的自由度,并正确指定原动件。
滚轮处为局部自由度,故r■-■':
'-1二■'■■:
'-''
机构的自由度为2,可以滑块和凸轮为原动件。
17.试计算图示机构的自由度
[参考答案]
滚子F处为局部自由度,J或K处为虚约束,C处为复合铰链。
去掉虚约束和局部自由度后,一一二-二■■-所以
F=2jdl-;?
H=3x11-2x14-1=4
[参考答案]
B、D处有局部自由度。
_:
'1
19.试分析图示装置能否运动,为什么(用机构自由度公式加以说明)
[参考答案]
■-■'L■--u;""」丄」」'''-;不能运动,因F为零。
20.试计算图示构件系统的自由度,并说明其能否成为机构
[参考答案]
C、DE均为复合铰链。
=3j7-2j»L-;.?
H=3x6-2x9-1=-1无法运动,不能成为机构。
21.试计算图示运动链的自由度。
[参考答案]
AE、F为复合铰链,故’■-1'■.':
-.-11
二、平面连杆机构及其设计
1.图示铰链四杆机构中,已知■1'111■:
1[1,AD为机架,若
[参考答案]要得到双摇杆机构有两种可能。
(1)机构存在整转副,且是BC,则匕为最短。
1)CD杆最长''丄丄」—•“11
2)CD杆中间长「丄一4厂匸1_l+'丄厂■1-1||:
(2)机构不存在整转副,亦不符合杆长和条件。
1)CD杆最长"'丄十『亠i.i"丄十‘丄厂」丄,_:
■'ii
但不超过三杆和即:
=1":
H
2)CD杆中间长'.2'_-■|_1
3)CD杆最短
G+S=也+%仏-協=40+50-8。
=IQmm
综上得111"ii
2.图示铰链四杆机构中,心r一工「「一1,问:
m为何值时(给
岀一取值范围),该机构成为曲柄摇杆机构
[参考答案]
(1)AD不能成为最短杆
(2)AD为最长杆—+亠、」:
一「一…
(3)AD为中等长,CD为最长杆时,
4;+'ch工50+90-80=6Cmm60mmS120mm
3试设计一曲柄导杆机构,已知导杆的行程速度变化系数5=2,机架长度
]:
:
'',求曲柄长度t(要求写岀设计步骤)。
[参考答案]
5=18(T(疋一1)悠+1)=18(rx(2-1)/(2+!
)=6CT。
作卫J=匚〔m,作一-疋」一,过A作£_二三,得B点。
故曲柄长丄'
4.图示曲柄摇块机构中,已知*二1上亍:
门二,直二;乳二in,试计算此机构的极位夹角L及从动杆BE的摆角。
[参考答案]
…C.-、亠-I-.''--■'八。
「_八。
摆角--1O极位夹角----
5.在图示铰链四杆机构中,其杆长为三二二n,门=E云匚二I,而另两个杆的长度之和为二-匚二1二匚,要求构成一曲柄摇杆机构,c、d的长度应为多少
[参考答案]
根据有曲柄条件:
—L.+•-匚n,且卜亠为连架杆,可知
?
则有5<':
—T
(1)
考虑极限状态有
又:
一匚二12T
三一二二「
(2)
故二二m「(3)
将⑶代入⑵得:
ti+125—c=Z?
-Fc
2c=125+^-^=125+45-55=115
故/C:
■■-.H..1丿亠】-:
■”一亠1同理若C为最大时,则」门―…;「「s
6.如图所示,在一铰链四杆机构中,已知IB(=500mmIcD=350mmIAD=300mm且AD为机架。
试分
析:
(1)若此机构为曲柄摇杆机构,Iab的最大值;
(2)若此机构为双曲柄机构,Iab的最小值;
(3)若此机构为双摇杆机构,Iab的取值范围。
[参考答案]
解:
(1)AB最短:
丄丨丄一一…一:
丄最大值为150mm
(2)AD最短:
1)AB不是最长,即」,所以一门三三*H:
2)AB为最长杆,即AB工二,且-I.:
..二一---所以二最小值
为450mm
(3)图示机构只有不满足杆长条件时才成为双摇杆机构。
|ab的取值范围~1-'-h_
7.如图示插床的导杆机构,已知:
丄…I…’二一,行程速比系数A=!
.<,求曲柄BC
的长度及插刀P的行程H又若需行程速比系数亍二二,则柄BC应调整为多此时插刀行程是否改变
[参考答案]
卩=毋=13『^^=3『丑巴=芒=1294inn
(1)<=
2
K-1/=^=180-=60"
(2)」「=:
^二一-1=-='t-'-l--&二匚-工匸二插刀行程增大
8.如图示曲柄摇杆机构,已知…心-1-1,试用解析法或
图解法确定:
(1)摇杆3的最小长度心z;
(2)曲柄1等速转动时机构的行程速度变化系数K;
(3)曲柄1为主动时,机构的最小传动传动角、亠。
(1)曲柄只能是1杆。
设匚(即杆3)是中长杆,(因为是求3杆的最短尺寸),
贝y有50+100至80+£,>150-80=70mm=70mm
(2)设摆杆的左极限位置为CD,右极限位置为CD,如图
址曲[如也必生二鱼]二亞09=乙"-AC^AD,而笔”型血
「血匚仏)2+%-味、
|mg―弦才亦十刃/(I酣-釣“居局
(3)机构的最小传动角「一二可以用解析法如下求得:
设lj^=a,i^=b,l^=c,=d,则:
(d_讦二耳F-
缶二武心盂[护+云-(才-疔]/(2"心)二33121宙
A占苴半
二、凸轮机构及其设计
1.在图示对心直动滚子从动件盘形凸轮机构中,凸轮的实际廓线为一个圆,圆心在
(1)
(2)
(3)
(4)
(5)
径斤二40mm凸轮绕轴心线O逆时针方向转动,心二笳mm滚子半径rHOmm试问:
该凸轮的理论廓线为何种廓线
基圆半径ro为多少
从动件的行程h为多少推程中的最大压力角为多少若把滚子半径改为rr=15mm从动件的运动规律有无变化为什么
[参考答案]
(1)理论廓线是以A为圆心,R+r=50mm为半径的圆。
(2)「「'「mm
(3)mm
—=—―-sin◎=号ol=arcsin(―)=3CT
(4)smasinq>Rf时
(5)滚子半径变化时,从动件之运动规律发生变化。
这是因为高副低代后形成的机构中的
连杆长IBA发生改变的缘故。
2.一偏置直动尖项从动件盘形凸轮机构如图所示。
已知凸轮为一偏心圆盘,圆盘半径R=30nm
几何中心为A,回转中心为Q从动件偏距ODe=10mmOA=10im凸轮以等角速度厲逆时针方向转动。
当凸轮在图
(1)示位置,即ADCD时,试求:
(1)凸轮的基圆半径r0;
(2)图示位置的凸轮机构压力角-;
(3)图示位置的凸轮转角-;
(4)图示位置的从动件的位移s;
(5)该凸轮机构中的从动件偏置方向是否合理,为什么
[参考答案]
⑴':
mm
川刀2D
冲-二J空_』1」十
(2)tg
8心箫嗚心小『
mm
w二J卅-的-二5.04
偏置方向不合理。
——+段
因为tg,图
(2)示偏置方向使门增大。
应把从动件导路偏置在凸轮转动中心
ds
——-e
dcpa=———
的右侧,此时tg1,贝K减小。
3.设计一偏置直动尖顶从动件盘形凸轮机构的凸轮廓线。
已知凸轮以等角速度三1
rad/s逆时针方向转动。
当凸轮从推程起始点处转过河时,从动件上升10mm此时从动件的移动速度匕-mm/s
(1)试用反转法找出此时凸轮廓线上与从动件相接触的点。
(2)在图上标出该点的压力角,并求出其值。
(3)
若从动件的偏距减为零,则上述位置处的压力角的值为多少
[参考答案]
(1)接触点I•见图示。
°』=—=——20
⑵昭1mn,压力角住见图示。
—e—e20—10
tg-■:
20
就=一=0.5,诧=2&5&F
⑶E=;tg-压力角增大。
4.
例鱼4已知-对心尖顶从动件巻形凸轮机构.其凸轮轮磨为-・輻心IMh该魁直径为D-40mnn偏更£二8mmc凸轮順时皆转动.试求:
1脚出该凸轮机构的运动简图■娈求从动件与門轮衽推程角炉处接越;
2画岀基圆.并求出墓圆半径f的值;
3
求出盘大压力角和嚴小压力角。
旦冲并说朋出现在什么位胃,
解!
1根据洽定的凸轮半径和偏心聊绘制凸轮轮廓。
凸轮为额时针方向離转,則反转垢从动件雄转方向为逆时针,因此推穆角甲X9『雄接触的运动简图如图4J5斷承。
2图4.15中小画为待求基圖■其半轻为”厂J?
-e^20*S=I2mnio
即
解得
③取凸轮运转过樫中某任意时刻•其压力角如图斗.16所示.ftAAW/)中,粮据正荻能理有:
40__B0
ain^AflO~ana
总_e
8irtXABO~mno
arrunf令sinZ#EO)
日3
5.已知:
对心直动尖顶从动件盘形凸轮机构,行程
A=30mm基圆半径哥=第°mm推程运动规律d卩如图,
71
求凸轮转角为M时的压力角二
1Hjc
丽
i/mm
1
1
9,^5mm|
I
30
(1
Q
」—fF
2
71
[参考答案]
(1)从动件推程运动规律为等速运动规律,当3一一时,s=15mm
四、齿轮机构及其设计
1.有一渐开线外啮合直齿圆柱变位齿轮传动,已知刖二4mm比二,禺=14,§=,虬二1,
M二0-25,变位系数工严02,勺二°百,无侧隙啮合中心距八16?
mm加工后经检验,大轮分
度圆齿厚乓不合设计要求,其余尺寸均可。
(1)测得大轮的珂"74口®试定性分析这对齿轮可否进行安装,啮合有何问题
(2)试另行设计一小齿轮与已加工的大轮配对使用,保持-不变,要求无侧隙啮合。
求该小轮的变位
系数,分度圆直径和齿顶圆直径。
[参考答案]
(1)设大轮加工后的实际变位系数为,则':
上'mm
因I<疋,齿厚减小,两轮可安装,但啮合时侧隙较大。
⑵设所设计小轮的变位系数为I,则t1-:
1_;
小轮分度圆直径
:
1一…4m
分度圆分离系数
j/=(f3,-C3)/m=3/4=0.75
齿咼变动系数
Ax=(斗)-^=005
齿顶咼
!
.;';+1-'mm
齿顶圆直径
■'.ij*'''mm
2.已知一对渐开线直齿圆柱标准齿轮,传动比
加=2巧,习=40,反二1,机二1omm吐20°
中心距正确安装。
求:
三,两轮的节圆直径-和亠,两轮的基圆直径」和=,两轮的顶圆直径
=40x25=100
亦二必-2何址>2二皿42x0+0.绚幻D二S75mm论二£-2(伺斗/)脚二1000-25二975m
d,=戸令=兀朋=31.416
1丄占mm
3.
一对渐开线外啮合直齿圆柱齿轮传动,已知了二二mm,二^二:
,’,/二二,传动
顶圆半径5、1】,齿根圆半径色、耳,节圆半径‘一、【,啮合角川,齿距心,分度圆齿厚A,分
度圆齿槽芒;
⑵当“一」二mm时,属于正传动
二、三、卫没有变化;〔、I、二有变化,且均为增大。
4.已知一对渐开线直齿圆柱标准齿轮传动,其模数?
?
■=4m,分度圆压力角二二丄」传动比1-f--'
(1)在正确安装时,中心距1--:
门口,试求
1)分度圆半径2宀;2)齿数;3)齿顶圆半径'「J;
4)齿根圆半径-;5)节圆半径■■■■-;6)啮合角。
(2)若上述齿轮传动中心距改为三二11:
二门时,
1)上述尺寸哪些有变化,哪些没变化2)如有变化求岀其数值。
[参考答案]
(1)1)1_I二''得[「花丄
a=rL¥r2—100r2-60mm
减短,导致重合度减小。
由于二轮实际安装中心距大于标准中心距,故实际啮合线
(1)求两个齿轮的分度圆半径二、孑和基圆齿距一二:
、一%二;
(2)求小齿轮的齿顶圆半径匸和大齿轮的齿根圆半径二二;
(3)求这对齿轮正确安装时的啮合角二和中心距三;
(4)将上述中心距加大匚二匸,求此时的啮合角及此时两轮的节圆半径*、T。
[参考答案]
(1).•一一.:
一^|-|,.■■■■":
r-
p=Twa=txmcosof=ttx5xcos20"=1^.761mm
(2).■--■'+-'「匚
f^2=ri~-c'm=100-1x5-0.25x5=9375mm
(3)正确安装:
1■'-'-"一■■:
.丁
(4)■/=m-I■■
o/=24.58°时=口7(1+如)=155/(1+2)=5167mm
£=i12^7(1+1^)=2x155/(1+2)=103.33mm
7.一对渐开线直齿圆柱标准齿轮,已知:
严二匕mm二匕-,",:
',二:
,丄—,一m,
安装中心距比标准中心距大2mm试求:
(1)中心距•「一
(2)啮合角二—(3)有无齿侧间隙(4)径向间隙:
:
=
(5)实际啮合线长度—
[参考答案]
(2)-1■-:
-l.1.■'.■—:
___「
(3)有齿侧间隙。
⑷「■--__.;mm
⑸|-]'.:
[mm
a;!
=arccosC^j/=29.531-4e他=arccosf^/j;3)=27.2648°
丁一LL'\_-L…mm
系数:
1,径向间隙系数厂[二,压力角農=1广。
求:
8.试设计一个无根切的渐开线直齿圆柱齿轮齿条机构。
已知齿轮1的齿数-」〔,模数方=]〔二,齿顶高
(1)齿轮1的分度圆直径•':
,节圆直径,齿顶圆直径•一,分度圆齿厚乞,啮合角];
(2)齿条2的顶高'亠,齿根高「二,分度线上齿厚h,齿轮中心至齿条分度线之间距离三
(1)‘一
17-15心讣
M乂X二=0.1176
==10x15=150mm17-1.176mm
£=疋;=
=150mm=or=20B
[参考答案]
(4)":
-.;-jI1H
a=二76.176mm
(5):
9.有一对渐开线圆柱直齿轮,已知"'1'''亠,用齿条刀加工,求其不发生根
切的最小中心距二
inv24D15,=00272
注.itwo/=2(工1+工』増心/(召+习)+inva1itiv20p=0.014904,
itiv26^5^0.0364,讪说器二00442M
[参考答案]
(1)
10.已知一对渐开线直齿圆柱标准齿轮,其齿数'-1'I,模数玄=4:
匸忙,试求(取二二
(1)小齿轮分度圆直径打;
(2)齿顶高%;(3)小齿轮齿顶圆直径‘--
(4)齿根高;(5)小齿轮齿根圆直径土-;(6)分度圆周节二二;
(7)小齿轮基圆直径I一一;(8)分度圆齿厚兰=;(9)分度圆齿槽距扌二:
(1)
:
=4x20=80mm
(2)
屁=埴加=4mm
(3)
=汕]十2札=
:
SEmm
(4)
i=1.25x4=5mtn
(5)
=―2斑=
:
70mm
(6)
d{l二£—2宓=
=70mm
(7)
=£C0£Of=
=80x0.94=
:
752mm
(8);r'.'
=6283mm
(9)
E=
6.283mm
(10)
2
122mm
(10)这对齿轮传动的标准中心距比=;
[参考答案]
232472°=23°1亍
cosorr=acosaI=(inv^-ihtoOCzi+^)/2tga-(a023845-1014904)x42+32)/2xa3M-C.5=o.m4
12.有一对外啮合齿轮,已知6=坯=14,科二感mn,抚二20°,「丄--,*1_:
无侧隙啮合中
心距af=87mn,为加工方便,两齿轮的参数完全一样。
试求齿轮的变位系数坊和盹,分度圆半径严,基圆半径
,齿顶圆半径,齿根圆半径°和顶圆齿厚二.
Au=t+r-v耳二罠丄)费幷一itW(7)
齿定高变动系数任意圆上齿厚「
[参考答案]
-\>.■:
■:
门I:
_■:
mm''Ji-j.]'1
uoe务=临/宥二39.47/4932
卅二24°51f59.7r0.46347583invar=tg<2/-(ti/180°)ctf=0.029472
invaf=tg20°-(7t/180°)x20°=
=0.014904五+亦二[②+為)f⑵gG)]5nva/-inv^)_o
两齿轮参数相同,取丫:
T.'■■■'变位后:
二二mm(不变化)
7L=rcosci=39.47
pmm
y-[(Zj+Zj)/2](cosaf/cosa*-l)=0.5
Ay二兀+花~y-006
r二f+A^w2+jw2-Avwa二49.32
mm
二于一履欣一/聊豹二3618
mm
=7T>wZ2+2黑wtg抚=10.6477
mm
兔«36°50,34ffinv£^=蛆冬■(加180°)塔二0.10629
五、轮系及其设计
2.图示为电动三爪卡盘的传动轮系。
已知各轮齿数为f11\,试
[参考答案]
⑴1,2,3,H为行星轮系。
4,2',2,3,H为行星轮系
⑵-一「」
(…
3.图示汽车变速器的部分轮系机构,I一:
:
亠「I1':
;--:
求传动比2nio
[参考答案]
t二玉=1+至=1+竺=兰
(1)行星轮系5,3,3',4、H-■'.'
常二灼-%“一电—士L片斗—舟m乳豆23,
=彳二1+鱼二1+竺二1!
⑵行星轮系1,2,3,3,4,H…二一一
2?
5
J51=i5S=万兀打="巧
4.
在图示的周转轮系中,已知各轮齿数为■■-:
''-"4■'。
试求传动比[
亦=1—疥=1—(—乞)=1+工=2[参考答案]
(1)1、2、4、H组成行星轮系。
也尸1-壯1十竺)“十沁匸里
(2)3、2'、2、4、H组成行星轮系。
亠
2x8118
[参考答案]
(1)1、2、3、4、H组成行星轮系。
1、2、5、6、H组成差动轮系
6.在图示轮系中,已知各轮齿数为一''「、一V;*,,-',轮1的转速-1-'■
r/min,方向如图示,试求轮5的转速弋的大小和方向
[参考答案]
(1)1、2、3、H(4)为行星轮系
处=(1+今)总甘
(2)4、5为定轴轮系。
40
20
2020+80
X1000
=r/min方向
r/min,方向如图示,试求轴U转速的大小及方向
X
[参考答案]结构分析:
1、2为定轴轮系。
2'、3、4、H为行星轮系,I
 升级会员
升级会员 