北斗三频数据的两个无电离层组合轨道钟差估计及其应用.docx
《北斗三频数据的两个无电离层组合轨道钟差估计及其应用.docx》由会员分享,可在线阅读,更多相关《北斗三频数据的两个无电离层组合轨道钟差估计及其应用.docx(24页珍藏版)》请在冰豆网上搜索。
北斗三频数据的两个无电离层组合轨道钟差估计及其应用
摘要:
本文针对全球连续监测评估系统(iGMAS)和国际多系统GNSS试验计划(MGEX)两个观测网接收到不同频率北斗卫星数据的情况,提出了一种北斗卫星(BDS)3个频率(B1I、B2I、B3I)的两种无电离层组合(B1/B3和B1/B2)数据精密定轨(POD)和钟差估计(CE)方法。
该方法可以统一处理上述两个观测网收到的北斗二代(BDS-2),北斗三代试验系统(BDS-3e)和北斗三代全球系统(BDS-3g)3个频率的观测数据,并在一次程序运行中对所有北斗卫星进行联合处理,可有效提高一次运行的数据使用率,从而提高参数估计精度。
采集了多天iGMAS、MGEX的GPS和BDS数据进行试验。
结果表明,对BDS-3e+BDS-2+GPS联合定轨时,采用三频两组合方法后由于增强了观测几何,BDS轨道重叠RMS为15.9cm,比传统双频法定轨精度提高11.3%。
新方法引入了与卫星端3个频率相关的码偏差,该量多天估计结果稳定,证明了模型和方法可靠。
将新方法用于BDS-3g+BDS-3e+BDS-2+GPS联合定轨,6颗BDS-3g的MEO卫星轨道重叠RMS为14.5cm,钟差重叠RMS为0.43ns,与BDS-3e的15.1cm和0.49ns相当。
开展了北斗卫星精密单点定位(PPP)试验,结果显示增加了BDS-3g的6颗MEO的精密轨道和钟差后,测站定位精度水平为39.6mm,天顶为37.8mm,比仅用BDS-2和BDS-3e卫星定位精度提高了11.1%。
关键词:
北斗三频两组合数据 精密定轨 钟差估计 北斗三代卫星导航系统
Orbitdeterminationandclockestimationviatwoionosphere-freecombinationsofobservationfromBDStriple-frequencydataanditsapplication
Abstract:
TheinternationalGNSSmonitoringandassessmentsystem(iGMAS)andthemulti-GNSSexperiments(MGEX)receiveBeiDounavigationsignalsondifferentfrequencies.Inthispaper,orbitdeterminationandclockestimationbasedontwoionosphere-freecombinationsofobservation(B1/B3andB1/B2)fromBDStriple-frequencydataisproposed.Inthismethod,dataofbothnetworksfromBeiDou2ndgeneration(BDS-2),BeiDou3rdgenerationtestsystem(BDS-3e)andBeiDou3rdgenerationglobalsystem(BDS-3g)canbeprocesseduniformlyinoneprogramrun,whichcaneffectivelyimprovedatausageatonerun,therebyimprovingparameterestimationaccuracy.TheGPSandBDSdataofiGMASandMGEXwerecollectedforseveraldaysfortesting.TheresultsshowthatfortheBDS-3e+BDS-2+GPSjointorbitdetermination,theorbitoverlapRMSoftheBDSMEOis9.5cmafterusingthetriple-frequencytwo-combinationmethod,whichis29%higherthantheaccuracyoftraditionaldual-frequencyprocessing.ThenewmethodintroducesacodebiasparameterrelatedtothreefrequenciesofeachinvolvingBDS-2satellite.Theresultshowsvaluesoftheparameterarequitestableforcontinuousone-daysolutions,whichprovesthatthemodelisreliable.ThenewmethodisusedforBDS-3g+BDS-3e+BDS-2+GPSjointorbitdetermination.The6BDS-3gMEOsatelliteorbitoverlapRMSis14.5cm,andtheclockerroroverlapRMSis0.43ns,whichisequivalentto15.1cmand0.49nsofBDS-3e.TheBDSprecisepointpositioning(PPP)testwascarriedout.TheresultsshowthatafteraddingthepreciseorbitandclockdifferenceofthesixMEOsofBDS-3g,thehorizontalpositioningaccuracyofthestationis39.6mm,andthezenithaccuracyis37.8mm,whichincreasespositioningaccuracyby11.1%thanBDS-2andBDS-3esatellitesonly.
Keywords:
twoionosphere-freecombinationfromtriple-frequencydatafromBDS preciseorbitdetermination clockerrorestimation BeiDou3rdnavigationsatellitesystem
2016年中国开始建设第三代北斗卫星导航系统(BDS-3)[1]。
首先,2016年10月完成了5颗北斗三代试验卫星发射组网(BDS-3e,2IGSO/3MEO)。
其次,2018年年底完成了19颗卫星的发射组网(1IGSO+18MEO),建成了北斗三代全球导航卫星系统(BDS-3g)的基本系统,开始向全球提供基础服务。
最后,2019年6月底完成了共计30颗卫星的发射组网(3GEO+3IGSO+24MEO),建成了北斗三代(BDS-3g)的全球组网系统,并于2020年7月正式提供导航服务。
伴随北斗二代提供正式服务和北斗三代卫星发射组网,多个地面跟踪观测网加紧建设,并以国际全球导航卫星系统服务组织(internationalGNSSservice,IGS)和中国的全球连续监测评估系统(internationalGNSSmonitoringandassessmentsystem,iGMAS)为主要代表。
IGS于2012年启动了多系统GNSS试验计划(MGEX),旨在对新的卫星导航系统和频率进行数据分析[2-5],截至2019年MGEX全球分布的一百多个跟踪站可以提供4个全球卫星导航系统的观测数据。
iGMAS于2013年成立,截至2019年已经在全球建立了二十多个跟踪站,可提供4个全球卫星导航系统的观测数据,并为用户提供卫星轨道、钟差、站坐标等产品[6-9]。
利用MGEX和iGMAS的跟踪数据,部分学者对BDS-3e卫星进行了轨道确定研究。
文献[10]处理了9个iGMAS站的BDS-3e观测数据,IGSO和MEO轨道重叠径向RMS分别为10和40cm。
文献[11]使用11个iGMAS站的BDS-3e观测数据进行定轨,重叠弧段径向分量为6~14cm。
显而易见,由于BDS-3e卫星跟踪站数量有限,其定轨精度差于BDS-2卫星。
值得一提的是,文献[12]使用iGMAS和MGEX站的观测资料并利用BDS-3e+BDS-2+GPS联合处理策略,得到BDS-3e的重叠径向RMS为3.7cm。
这表明使用更多的地面网观测数据对BDS-2和BDS-3进行联合定轨理论上可以获得更高的定轨精度。
但使用传统双频方法联合处理上述双网的北斗二代、三代星数据时存在一个困境,限制了北斗卫星定轨精度的进一步提高。
具体来说,在北斗二向北斗三发展过渡期间,B2I信号将逐步减少,而B1I和B3I信号保留,同时北斗三进行信号体制升级,相应的卫星数也将增加。
由于早期B3I信号的接口控制文件(ICD)发布较晚,因此国际上(例如MGEX)有一批仅提供B1I和B2I观测信息(无B3I信息)的接收机[13-15]。
因此在北斗二向北斗三过渡期间的精密定轨和时间同步,存在B1I/B2I和B1I/B3I数据联合应用的情况,也就有必要对北斗三频数据融合定轨和钟差估计进行研究。
为此,在文献[16]的研究基础上,本文提出了北斗卫星3个频率的两种无电离层组合数据联合定轨和钟差估计方法,可以一次处理BDS-2的B1I和B2I频率数据以及BDS-2和BDS-3的B1I和B3I频率数据。
在此基础上,将该方法应用于6颗最早入轨的BDS-3g卫星的轨道确定和钟差估计,进行初步精度评估。
同时给出了增加BDS-3g的6颗卫星的精密轨道和钟差后,利用BDS-2+BDS-3e+BDS-3g进行测站精密单点定位(PPP)的精度改善。
1基于三频数据的两个无电离层组合数据处理方法1.1伪距和载波相位的双频无电离层组合
GNSS卫星的F频率码和载波相位观测方程表示如下
(1)
(2)
式中,索引i和k表示卫星和接收机;F表示频率;Pk, Fi和Lk, Fi表示F频率的码和相位观测量;ρki是从接收机到卫星的几何距离;c是光速;Δtk和Δti代表接收机和卫星的时钟偏差;bk,F和bFi是接收机和卫星F频率的码硬件延迟;dk,F和dFi是接收机和卫星F频率的相位硬件延迟;Tki是接收机与卫星的对流层延迟;Ik,Fi是F频率的电离层延迟;λF和Nk,Fi是F频率载波相位的波长和整数模糊度;ek,Fi和εk,Fi为F频率码和载波的测量噪声和多路径效应的总和。
在双频GNSS定轨中通常使用码和载波相位的无电离层观测组合(ionosphere-free,IF),根据式
(1)和式
(2),将观测量的IF组合表示如下
(3)
(4)
式中,bk,IF和bIFi是接收机k和卫星i的无电离层组合码硬件延迟;dk,IF和dIFi是接收机k和卫星i的无电离层组合相位硬件延迟;λIF和Nk,IFi为无电离层组合波长和模糊度,它们实际上是宽巷模糊度和窄巷模糊度的线性组合[17-18],它们可以表示为
(5)
(6)
(7)
(8)
(9)
(10)
伪距观测方程中,硬件延迟和钟差线性相关,故数据处理时接收机和卫星的码延迟bk,IF和bIFi分别被吸收到接收机和卫星钟差参数Δtk和Δti中,从而形成新的钟差参数Δtk和Δti(称为导航钟差),表示如下
(11)
(12)
则相应伪距无电离层组合的观测量表示为
(13)
在同时利用伪距和相位时,一般用伪距钟差对相位钟差进行约束,即伪距钟差和相位钟差作为同一参数处理,因此相应的相位无电离层组合的观测量表示为
(14)
式中,Nk,IFi为新的电离层模糊度参数,它吸收了整数模糊度、卫星和接收机端的相位和伪距硬件延迟之差的线性组合;Nk,IFi表达式参见文献[19],因此该参数不具有整数性质。
1.2北斗三频数据的两个无电离层组合模型
BDS-2有3个频率B1/B2/B3,BDS-3有两个既有频率B1/B3,因此使用B1/B3进行无电离层组合即可对BDS-2和BDS-3进行联合定轨。
但是如果一部分接收机只能收到B1/B2数据,另一部分接收机只能收到B1/B3数据的情况下,如何使用尽量多的测站对BDS-2和BDS-3进行联合定轨,就是急需解决的问题。
这里提出一种方法,不用修改双频数据处理程序,就可以在一个软件一次运行中,同时处理B1/B2和B1/B3两个无电离层组合数据,从而实现BDS-2和BDS-3联合定轨和钟差估计。
首先引入以下符号
(15)
式中,f1、f2和f3分别指B1I、B2I和B3I频率。
将式(14)代入式
(1)并分别形成码观测量的B1/B2和B1/B3无电离层组合,表示为
(16)
(17)
考虑到上面提到的时钟偏差和码延迟之间的相关性,式(15)和式(16)可以简化为
(18)
(19)
式中
(20)
假设1个接收机仅提供B1/B3或B1/B2数据(大多数MGEX和iGMAS站的情况),对于码伪距的非差无电离层组合观测,每个站对应1个接收机钟差Δtk,13(B1/B3)或Δtk,12(B1/B2),而无论接收机的观测量是B1/B3还是B1/B2,卫星钟差Δti统一参考B1/B3组合。
相应的,在B1/B2观测方程中会额外引入1个与卫星以及频率B1、B2和B3相关的常数偏差参数,以补偿上述卫星钟差参考B1/B3的设置方案,在本研究中该常数偏差被称为BDS的组合间偏差(inter-combinationbias,ICB)。
为了防止法方程奇异,对ICB参数引入零均值约束条件,即将所有B1/B2观测方程中出现的BDS卫星的ICB之和设置为零,表示如下
(21)
式中,n为B1/B2观测方程中卫星的数量。
对于相位的非差无电离层组合观测,B1/B3或B1/B2的无电离层相位非整数计数偏差可以被它们相应的浮点模糊度吸收,因此在三频处理中不需要特殊处理。
在基线模式下,如果1个基线中的两个接收机为同1个双频组合(B1/B3或B1/B2),则形成双差时可以完全消除接收机端和卫星端的码伪距硬件延迟和相位非整数计数偏差,从而保持模糊度整数特性。
而如果两个接收机为不同的双频组合(一个是B1/B3,另一个是B1/B2),则不可能进行有效的参数消除,处理会变得非常复杂。
因此,仅在同一种无电离层双频组合的接收机之间形成基线,即本方法在BDS定轨时不允许不同的双频组合测站间形成基线。
1.3北斗三频两组合与GPS双频数据定轨和钟差估计
当三频两组合BDS和双频GPS数据一起处理时,将无电离层非差观测方程列出如下
(22)
式中,索引C、G和r分别指BDS、GPS和接收机。
同一台接收机接收BDS和GPS信号时其接收时延是不同的,这种差异称为BDS和GPS的系统间偏差(inter-systembias,ISB)[20]。
考虑接收机ISB,则接收机钟差和卫星钟差表示如下
(23)
(24)
则伪距观测方程为
(25)
省略推导过程,可以得到相位观测方程为
(26)
式中,Nr,IFG吸收了GPS所用无电离层组合的两个频率卫星和接收机端相位和伪距硬件延迟之差的线性组合;Nr,IF13C吸收了BDS所用无电离层组合的两个频率B1/B3卫星和接收机端相位和伪距硬件延迟之差的线性组合、BDS与GPS的ISB参数项;Nr,IF12C吸收了BDS所用无电离层组合的两个频率B1/B2卫星和接收机端相位和伪距硬件延迟之差的线性组合、BDS与GPS的ISB参数项、B1/B2与B1/B3之间的ICB参数项。
可见,多系统多频率相位观测方程中不出现ISB、ICB项,也未新增其他估计参数。
它们与单系统双频的观测方程形式一致,且上述3种模糊度参数均非整数。
除了BDS系统内不同的双频组合(详见1.2节最后一段),BDS与GPS在系统内和系统间均可以形成双差观测,以消除卫星和接收机的时钟偏差。
对观测方程线性化后,文献[20]中的表达符合,列出本方法定轨的估计参数如下
(27)
(28)
(29)
式中,σ0G和σ0C分别是GPS和BDS的卫星以及太阳光压参数的初始状态向量;ZTDr是测站对流层天顶延迟湿分量;δEOP是地球定向参数矢量;Nkl,IFij是卫星i、j和接收机k、l之间的双差相位模糊度。
然后将双差处理中求解出的轨道等参数固定并代入非差观测方程,以求解卫星和接收机钟差。
从式(21)至式(25)可以得到,利用三频两组合BDS和双频GPS的非差观测量,进行钟差估计(CE)时的待估参数是
(30)
式中,Δtr,IF, G为接收机钟差;ΔtG和ΔtC是GPS和BDS的卫星钟差;ISBIF13, G_C和ISBIF12, G_C分别是接收机端BDS的B1/B3组合和B1/B2组合与GPS之间的系统间偏差;ICBIF12_13C是BDS卫星端的B1/B2与B1/B3之间的双频组合延迟偏差(组合间偏差);Nr,IFG、Nr,IF13C和Nr,IF12C是GPS、BDS的B1/B3和B1/B2无电离层组合相应的非差模糊度。
由于GNSS单向观测只能求解相对钟差,因此需要增加约束条件。
这里引入GNSS数据处理中常用的零均值约束方程,并且推广到ICB参数,具体表示如下
(31)
(32)
(33)
对于钟差参数,选择那些性能良好的接收机钟加入钟差零均值方程式(31);对于组合间偏差,接收机收到哪些星的B1/B2组合数据,这些星的ICB参数就要加入组合间偏差零均值方程式(32);所有多系统接收机的ISB都加入系统间偏差ISB零均值方程式(33)。
2处理策略和跟踪网2.1处理策略
特别需要指出的是,使用BDS的两个双频组合数据进行定轨时,为了避免不同的双频组合测站间形成双差观测(如1.2节所述),可以用预先对测站进行分组的方法简单实现。
具体方法为,接收到由BDS-3e或BDS-3g卫星发送的B1/B3频率数据的站被分成一组,接收到BDS-2卫星发送的B1/B2或B1/B2/B3频率数据的站被分成另一组,然后在同一组中形成单差基线。
该分组步骤同样为钟差估计带来了便利,因为只有收到BDS卫星的B1/B2或B1/B2/B3频率数据的那一组测站,其待估参数集合中才需要设置ICB参数。
分组完成后,就可以使用两组中的所有BDS和GPS(如果存在GPS)双差码和相位观测数据来进行精密定轨的相应处理流程,以求解卫星轨道、ZTD、EOP和站坐标。
然后,将这些求解出的参数引入钟差估计处理流程,使用非差观测来估计ISB、ICB、卫星和接收机钟差。
在定轨和钟差估计中,所有卫星系统都未固定模糊度。
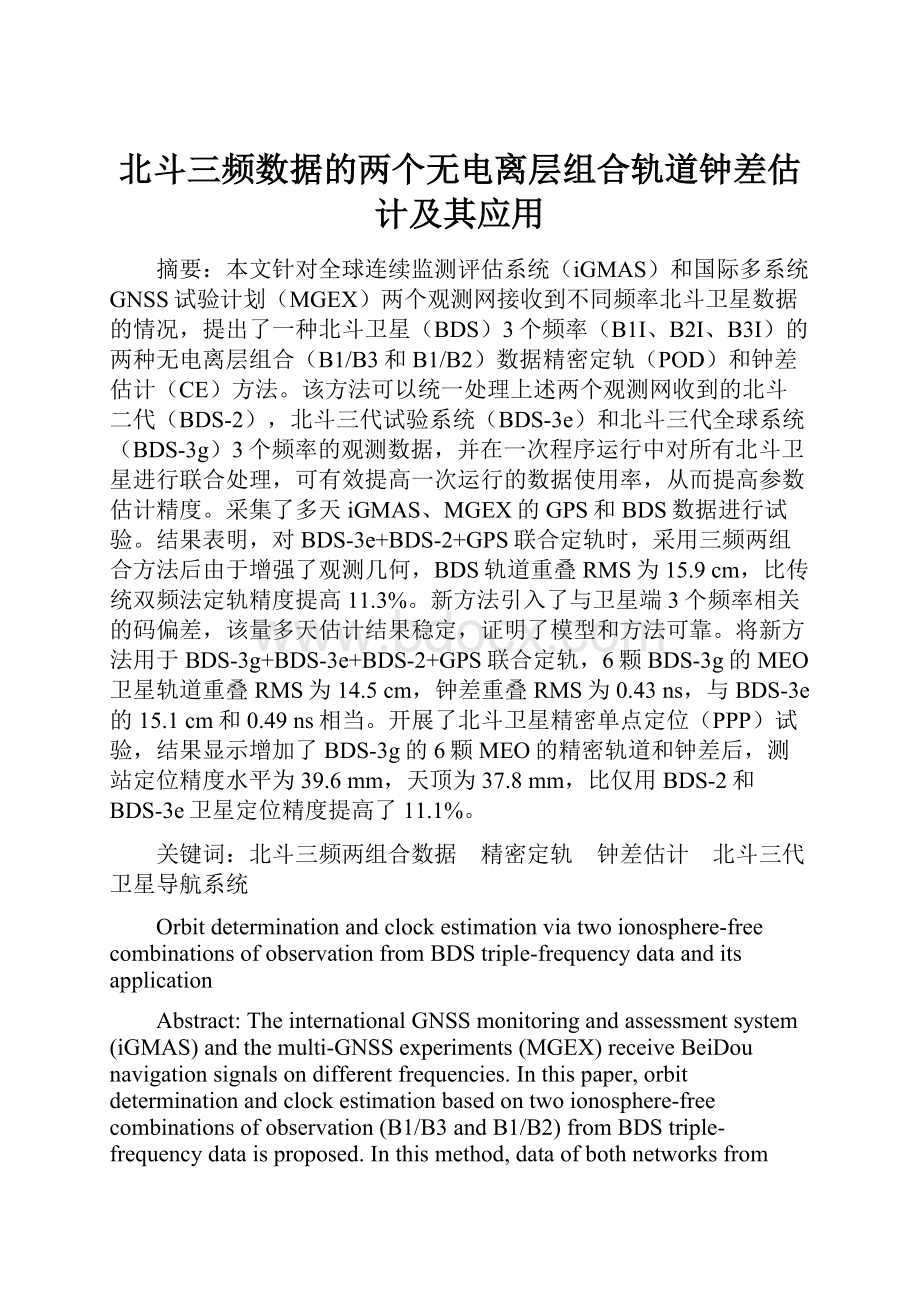
三频两组合处理的过程如图1所示。
图1 三频数据融合处理流程Fig.1 Triple-frequencycombinedprocessing
图选项
载波平滑伪距和原始载波相位观测值的先验标准差分别设置为0.2m和2mm。
观测权重采用高度角相关,高度截止角设为10°。
详细的模型和估计策略见表1。
表1 三频数据定轨的观测模型、动力学模型和估计策略Tab.1 Observationalmodels,dynamicalmodelsandestimatedparametersfortriple-frequencycombinedPOD
items
模型和策略
观测量
BDS-3/BDS-2:
B1I+B3I码和相位无电离层组合
GPS:
L1+L2码和相位无电离层组合定轨:
双差;解钟:
非差
数据采样率/s
300
数据弧长
定轨3d;解钟1d
数据高度截止角/(°)
10
观测加权
与高度角相关,sin(E)
相位缠绕
应用相位极化
卫星天线相位中心平均偏差(PCO)
GPS/BDS-2:
修正;使用igs14.atx
BDS-3:
修正;使用卫星设计部门推荐值
卫星天线相位中心球谐项偏差(PCV)
GPS:
修正;使用igs14.atx
BDS-2/BDS-3:
未修正
接收机天线相位中心平均偏差(PCO)
GPS:
修正;使用igs14.atx
BDS:
未修正
接收机天线相位中心球谐项偏差(PCV)
GPS:
修正;使用igs14.atx
BDS:
未修正
地球重力场
EGM2008模型12×12阶次
第三体摄动
太阳、月球、行星(JPLDE405)
太阳光压
ECOM5-参数模型,无先验信息[21],估计参数
姿态模型
GPS/BDS-3:
动偏航名义姿态
BDS-2:
动偏航和零偏航姿态
潮汐位移效应
地球固体潮、海潮、极潮
相对论效应
考虑
对流层延迟
(troposphericdelay)
GMF模型的干分量作为先验;
GMF模型湿分量作为估计,估计天顶延迟、水平方向两个延迟梯度参数。
分段线性函数,天顶延迟每段2h,梯度每段24h
站坐标
估计,整体无旋转最小约束
卫星轨道
估计
地球定向参数EOP
估计,紧约束到IERS的UT1
卫星钟差
估计,历元参数
接收机钟差
估计,历元参数
DCB参数
估计,包括GPS-P1C1,ISB,ICB
相位模糊度
估计,定轨双差浮点模糊度,估钟非差浮点模糊度
表选项
卫星研发部门(SDD)提供的BDS-3e、BDS-3g卫星的天线相位中心(PCO)见表2,而天线相位变化(PCV)本文未考虑。
BDS2卫星的PCO采用了IGS推荐的值,参见igs14.atx,且PCV未考虑。
对于GPS卫星,则使用IGS的igs14.atx文件中的PCO和PCV。
表2 部分北斗三卫星的天线相位中心坐标(卫星研制部门提供)Tab.2 PCOsofBDS-3satellites(providedbySDD) mm
sat
x
y
z
C31
-50
0
800
C32
-110
-300
2000
C33
-200
0
1500
C34
-200
0
1500
C19
-200
0
1500
C20
-200
0
1500
C21
-200
0
1500
C22
-200
0
1500
C27
-50
0
800
C28
-50
0
800
表选项
BDS-2的IGSO和MEO卫星姿态在动偏航模式和零偏航模式之间切换,BDS-2的GEO卫星始终保持零偏航姿态模式,而BDS-3e和BDS-3g始终为动偏航模式,这些在数据处理中都进行了正确建模。
根据文献[22]的研究,对于BDS的IGSO和MEO定轨,ECOM五参数模型比ECOM九参数模型效果更好,因此本文也选择了无先验约束的ECOM五参数模型用于对光压建模。
数据采样间隔为5min,定轨和钟差估计弧长为72h。
采用重叠弧段RMS评估定轨精度,重叠弧长为24h。
由于GNSS技术本质上仅给出相对卫星时钟,因此在比较卫星钟差时使用二次差法,一次差在所选卫星和所有其他卫星之间进行,二次差针对所有重叠历元进
 升级会员
升级会员 