曲柄滑块机构.docx
《曲柄滑块机构.docx》由会员分享,可在线阅读,更多相关《曲柄滑块机构.docx(11页珍藏版)》请在冰豆网上搜索。
曲柄滑块机构
曲柄滑块机构
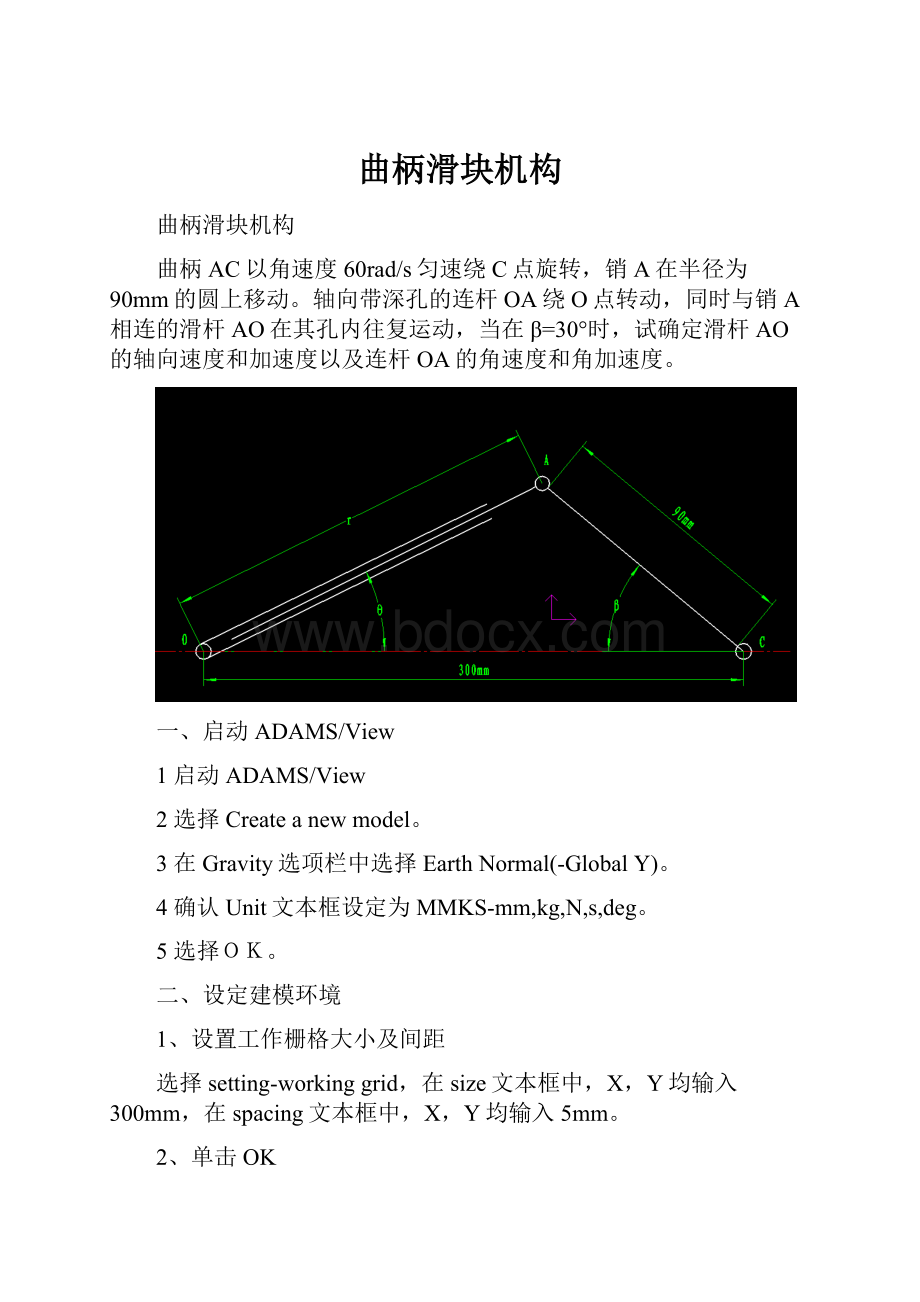
曲柄AC以角速度60rad/s匀速绕C点旋转,销A在半径为90mm的圆上移动。
轴向带深孔的连杆OA绕O点转动,同时与销A相连的滑杆AO在其孔内往复运动,当在β=30°时,试确定滑杆AO的轴向速度和加速度以及连杆OA的角速度和角加速度。
一、启动ADAMS/View
1启动ADAMS/View
2选择Createanewmodel。
3在Gravity选项栏中选择EarthNormal(-GlobalY)。
4确认Unit文本框设定为MMKS-mm,kg,N,s,deg。
5选择OK。
二、设定建模环境
1、设置工作栅格大小及间距
选择setting-workinggrid,在size文本框中,X,Y均输入300mm,在spacing文本框中,X,Y均输入5mm。
2、单击OK
三、创建曲柄AC
1、单击
,在主工具箱的选项栏中选择newpart选项。
2、选中length选项,在其文本框中输入90mm,指定连杆长度为90mm。
3、在建模视窗中选择点(0,0,0),然后再在原点右侧横坐标轴上选择一点,定义连杆的方向,这样就创建了曲柄。
四、创建连杆OA
1、在几何模型工具库中,单击旋转实体工具图标。
2、在主工具箱的选项栏中选择NewPart选项。
3、在建模视窗中选择点(0,0,0)和(-210,0,0)定义创建柱体的轴线。
4、在建模视窗中选择下列点(0,5,0),(0,10,0),(-210,10,0),(-210,5,0),(0,5,0)创建连杆OA截面轮廓。
如果自动捕捉特殊点,按ctrl键可以选择任意位置。
5、右击鼠标,完成连杆的创建,如图
五、创建滑杆AO
1、在几何模型工具箱中,单击圆柱体工具图标。
2、在主工具箱的选项栏中选择NewPart。
3、选中length选项,并在其文本框中输入210mm,设定滑杆长度。
4、选中radius选项,并在其文本框中输入5mm,设定滑杆半径。
5、在建模视窗中选择点(0,0,0)和横坐标负方向上的一点,创建滑杆AO。
六、创建转动副
1、在运动副工具库中,选择旋转运动副工具图标
2、在Construction选项框中选择1Location和Normaltogrid选项。
3、在建模视窗中选择点(90,0,0),即曲柄的右端点,在该位置创建转动副。
重复步骤1,2,选择点(-210,0,0),即在连杆OA左端点处创建转动副。
将步骤2中的选项改为2Location和Normaltogrid,然后依次选择曲柄、滑杆AO和点(0,0,0),在曲柄和滑块AO之间创建转动副。
七、创建移动副
1、在运动副工具库中,选择移动副工具图标
2、在Construction选项框中选择2Bod-1Loc和PickFeature。
3、选择滑杆AO和连杆OA,作为移动副所连接的两个零件。
4、选择连杆OA质心,作为运动副位置。
5、移动鼠标使箭头水平,单击鼠标,生成移动副。
至此,曲柄滑块机构的虚拟模型创建完毕,如图
八、设定曲柄AC的初速度
所有零件已被建立并加上约束。
下一步给转动副施加转动,指定曲柄每秒转动一周。
1、在工具箱中,选择旋转运动工具图标
。
2、在Speed文本框中输入60r,定义转动速度为60rad/s。
3、选择曲柄右边转动副,创建该运动如图
九、模型仿真
1、单击交互式仿真分析工具图标
2、选择endtime,并在其文本框输入0.3。
3、选择Steps,并在其文本框输入150。
4、单击
,开始仿真分析。
十、测定曲柄角度
因为该实例需要求曲柄与-x轴的夹角为β=30°时的位移、速度和加速度,所以首先可以绘制角度-时间的曲线图,找出模拟中曲柄的角度为30°的位置。
绘制交角的角度-时间曲线图的步骤如下:
1、在Build菜单中,将鼠标依次指向Measure和Angle,然后选择New…,显示角度测量对话框如图
2、在MeasureName文本框中输入beta。
3、在firstmarker文本框中输入连杆OA左端的标记点名称,在MiddleMarker和LastMarker文本框中,分别输入曲柄的右端标记点和左端标记点名称。
4、选中CreateScriptChart选项
5、单击OK按钮,生成夹角的角度-时间曲线,如图
十一、测定滑杆AO轴向速度
和加速度
1、在滑杆AO上右击鼠标,在弹出菜单中选择Measure,显示物体测量对话框。
2、在MeasureName文本框中输入r_dot。
在Characterristic选项栏中选择CMvelocity选项
在Component选项区选择X选项
在Representcoordinatein文本框中右击,选择Marker-Pick,选择连杆OA的左端的标记点
3、单击Apply按钮,创建滑杆AO的轴向速度曲线图,如图
4、在MeasureName中输入r_double_dot
在Characterristic选项栏中选择CMacceleration选项
在Component选项区选择X选项
在Representcoordinatein文本框中右击,选择Marker-Pick,选择连杆OA的左端的标记点
在Dotimederivativesin文本框中右击,选择Marker-Pick,选择连杆OA的左端的标记点
5、单击OK按钮,创建滑杆AO轴向加速度曲线图
十二、测定连杆OA的角速度
和角加速度
1、在连杆OA上右击鼠标,选择Measure,显示物体测量对话框。
2、在MeasureName中输入theta_dot
在Characterristic选项栏中选择CManglevelocity选项
在Component选项区选择z选项
3、单击Apply选项,创建连杆OA的角速度曲线图
4、在MeasureName中输入theta_double_dot
在Characterristic选项栏中选择CMangleacceleration选项
在Component选项区选择z选项
5、单击Apply选项,创建连杆OA的角加速度曲线图,如图
至此,该实例的模型建立及部分数据处理准备工作已经完成,输出该模型的命令文件,文件名为crank_slider.cmd。
十三、分析曲线图,求解
,
,
方法一:
1、通过夹角的角度-时间曲线,找出β=30°的时间t。
2、通过滑杆AO轴向速度
曲线图、滑杆AO轴向加速度
曲线图、连杆OA的加速度曲线图
,和角加速度曲线图
,分别找出t时刻的
,
,
值
方法二:
1、单击图标
或按F8键,进入专用后处理模块(ADAMS/Postprocessor)。
2、分别绘制
-β,
-β,
-β,
-β曲线图。
3、分别找出β=30°时的
,
,
值。
ADAMS分析结果:
=3.56m/s,
=318m/s
,
=17.82rad/s,
=1498.2/s
。
 升级会员
升级会员 